除上述对于基于本体的任务规划方面的研究之外,在知识获取、现实世界与本体的映射等方面的研究也开始受到关注。PMK本体通过集成感知模块,实现了对物品和态势的推理能力,陈志贤等人将本体技术应用于复杂环境中机器人的自主规划[70-71],提出了基于整合活动图式的机器人任务规划经验学习方法,所学习到的任务经验可以泛化应用到同类任务的多情形自动规划问题之中。李泚泚[72]提出一种层次化物品知识自主构建方法,实现了物品实例知识的自主构建。
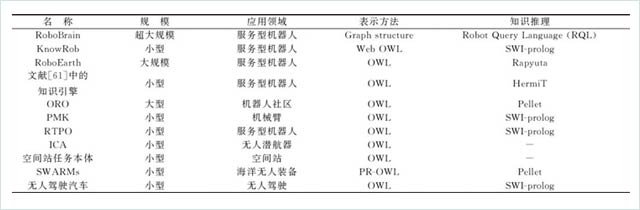
几种典型的知识本体情况对比如表1所示。总体来说,知识本体在任务规划领域的应用主要集中于室内服务型机器人,在专业无人系统,特别是无人作战系统中的应用还很少见。几种本体中,小型化、专业化的本体技术应用情况和表现要好于通用型的大规模本体。OWL是本体构建首选的表示语言,此外,本体通常会根据需要搭配相应的推理机,实现知识推理和应用。
表1 典型无人系统本体情况对比
Table 1 Comparison of typical robotic ontologies
2.2 本体在军事任务规划领域的应用现状
本体在军事任务规划领域有着深厚的研究历史。较早的任务规划本体,如PLANET就是基于军事应用背景研发的。本体技术在军事领域的应用已经涉及到了战场态势表示与评估、作战计划表示与校验等方面。这些应用场景都是进行任务规划不可或缺的知识来源,或者本身是任务规划的一部分。
(1) 基于本体的态势表示、感知与估计。早期的应用研究停留在比较浅的层面,本体更像是一个规范化表示信息的数据库,如文献[73]提出了一种基于本体的发布订阅系统,能够进行大量、连续的复杂语义查询。文献[21]构建了基于本体的战场态势表示方法,通过本体实现态势数据的统一规范表示和战场态势推理。文献[74]提出了一种基于本体的态势感知系统“BeAware!”,采用了基于规则的推理技术提高了系统的推理能力,贝叶斯网络与本体的结合使态势感知中大量的不确定性知识表示和推理问题得到了一定程度的解决。文献[48]将本体技术用于可疑船只的属性判断中,基于MEBN实现多源信息融合。文献[75]构建了网络威胁要素知识本体,并成功应用于网络威胁态势推演与评估。文献[76]将贝叶斯网络与本体技术相结合,提高了态势估计的准确度。文献[77]将本体与MEBN相结合用于无人作战系统在不确定场景下的智能决策。
(2) 基于本体的计划表示和评估。常识百科全书本体(enCYClopedia,CYC)[78]是第一个常识知识库,也经常作为上位本体来构建军事领域本体,如作战行动过程本体[79]。核心计划表示本体[80]是九十年代美国国防部高级研究计划局针对军事领域提出的军事计划表示本体,能够描述计划、过程、行动等通用信息。文献[81]构建的本体将计划看作是一系列的约束构成的集合,实现了任务的层次化分解。共享计划和行动表示本体[82]是集成了多项本体研究的成果而建立的一种共享计划本体,其计划的表示更加规范和全面。联合作战空中任务指挥官本体[83]是一种用于空军战役规划的本体,并且在应用中使用了基于知识的混合主动规划方法。文献[84]将本体用于作战方案的表示和完整性评估。基于本体的计划表示实现了特定领域规划知识的表示,使机器能够共享和重用现有的知识并进行复杂任务的规划。但这种基于知识的规划通常针对领域问题而专门设计的,不同领域之间具有不同的知识表示和描述方法,重用性很差。
2.3 知识本体在无人系统任务规划中的作用
(1) 基于领域知识实现任务智能规划。未来战场上异构无人系统的大规模应用,必然需要一个高效的任务规划和管理机制,实现大规模无人作战群体的高效智能任务规划。知识本体能够保存无人系统学习到的规划参数或者作战规则,并将之应用于未来的任务中。此外,通过知识本体的支持,无人系统可以针对人类的高层指令自动完成行动序列的生成,并检测任务是否可以达成,如文献[26]和文献[61]。
(2) 支持基于领域知识的任务重规划。实际场景中,无人系统面临越来越多的不确定性因素使无人系统很难通过一个固定的任务计划完成任务的执行,迫切需要任务重规划技术的支持。当前,领域知识在任务重规划中发挥着重要的作用,文献[85]构建了军事领域知识库与规则库,实现空中任务的重规划,文献[86]构建了水下机器人任务本体并用于任务的重规划。文献[87]指出基于领域知识的任务重规划方法,特别是通用化的知识库是重要的研究方向。
(3) 支持知识共享。本体为不同无人系统提供一个进行知识共享的基础,对信息交互进行了规范,使各个无人系统学习到的知识可以通过网络进行共享,如SWARMs本体。本体使无人系统之间的交互从信息交互的层面提升到知识交互的层面。通过作战知识的积累和共享,可以启发无人系统探究新型作战模式。
(4) 支持基于知识推理的慎思型智能决策。例如,在文献[88-89]中将人类实践过程中形成的经验常识应用于环境中车辆驾驶意图的判断上,并取得了良好的效果。本体是对知识的结构化描述,包含了概念之间的语义关系,这种语义关系是实现理性决策的基础。基于理性推理的决策具有可解释性和稳健性的特点。
3 现状分析与重要研究方向
3.1 研究现状
(1) 本体构建技术相对成熟,有大量可供参考的案例,既有针对一般任务的本体,也有针对领域任务的应用本体。但是不同领域中的任务逻辑、知识需求、表示范围等仍然有比较大的差别。本体技术在新的领域应用仍需在领域知识表示方法和表示能力等方面进行大量的研究。本体技术在研究初期就与军事问题紧密相关,在军事计划表示、态势分析中发挥了重要作用,但是本体在支持无人作战系统的任务规划方面还期待更加系统的研究。
(2) 行动学习能力成为新的研究热点。任务本体的构建通常需要领域专家的专门知识,但是专家领域知识的有限性和现实世界的复杂性,使无人系统行为的抽象化越来越困难。这导致了当前知识本体的构建往往局限于比较简单或者有限的场景,现实世界的领域本体模型往往很难开发和维护,因此人们在解决规划问题时往往很少使用领域知识,而是采用效率低但更容易的方法,除了专门研究规划问题的团体之外,对构建领域知识模型的关注很低[17]。文献[90]对机器学习在行动模型和规划知识的自动获取方面的应用进行了综述,文献[91]重点在行动模型学习方面进行而来综述,并提出了研究的方向。行动模型的学习的输入通常是一组行动序列,输出则是PDDL等描述语言定义的行动模型。文献[92]提出了一种从非符号输入中学习一阶符号表示的方法,学习到的一阶符号可以直接作为规划器的输入,文献中展示了从汉诺塔、抓取和方块世界等经典任务规划问题的状态空间中提取移动、拾取和放下等行动模型的方法。
(3) 领域知识本体应用效果好,但仍存在异构本体集成和通用本体的研究需求。领域知识本体应用范围有限,在开放场景中的效果不佳。因此,通用化的本体依然有需求的紧迫性,但是受限于当前的技术水平,当前的研究多从异构本体的集成入手[23,93],解决实际应用问题。
3.2 重要研究方向
虽然对于任务规划本体的研究已经很多,但是如何将本体应用到任务尤其是复杂任务中的研究尚处于起步阶段。本体在机器人领域虽然取得了瞩目的成果,但是仍存在很多未解决的问题。以知识为中心,可以分成前中后3个部分,未来重要的研究方向如下。
(1) 前端主要研究知识的获取和认知问题,如从文本等结构化的数据中析取知识、如何从人类的行为中学习到经验并使之经验化、如何实现环境的认知和与知识本体的逻辑接地[94]等。文献[95]在基于示教的任务规划学习方面进行了研究。文献[96]研究了家庭环境中的逻辑接地问题。文献[90-91]分别从机器学习用于规划知识自动定义和行动模型学习两个方面进行了技术综述,指出知识表示、学习算法、知识的应用、现实世界的应用等重要问题。
(2) 居于中心位置的知识建模与表示仍然存在许多难以解决的问题,如异构本体的集成[93]、大规模知识本体下的处理效率、更强的表示能力、不确定知识的表示等,以及支撑计划重规划的规则库构建与运用等。当前知识表示语言表示能力有限,虽然各种拓展表示语言进行了功能的拓展,但是在描述现实世界,支撑复杂场景方面还需要进一步的研究。
(3) 后端主要研究知识的应用,如何在知识本体支持下实现智能规划和决策,需要将离散的符号规划与连续的空间寻优问题结合起来。然而,即使在机器人领域,这种融合仍仅是在比较浅显的层面,知识对任务规划的知识多是停留在知识查询的层面,很少能够体现出知识推理能力的作用。但是,随着学术界对于第三代人工智能的探索和思考,符号主义与连接主义的集成符合未来的发展趋势,无人系统的智能化研究也逐渐从底层的运动规划上升到任务规划层面,并呈现两者高度融合的特点,基于本体的无人系统任务规划属于后端应用问题,主要研究知识推理、任务规划和决策等知识的应用。
4 无人系统任务规划本体构建原则
构建无人系统任务规划本体需要考虑多方面的因素,本节从应用范围和目标、非功能性需求、功能性需求3个方面进行了阐释。
4.1 明确本体应用范围和目标
进行任务规划本体的构建,首先需要明确本体的应用范围和应达到的目标。无人作战系统的任务本体应立足其应用场景构建领域知识本体,防止出现本体过于泛化,规模过于庞大而难以应用的问题。无人作战系统任务规划本体应完成两个主要工作,一是清晰定义领域知识相关的概念;二是对概念之间的关系进行明确的定义。本体应能描述异构无人系统(如传感器、执行器等组件)及其工作的环境(如地形、威胁、障碍等战场要素),并对无人系统之间必须交换的信息进行明确的定义。
4.2 满足本体的非功能性需求
互操作性、模块化、可重用和可扩展是本体应具备的非功能性特征。互操作性是满足无人系统之间信息交换的基本条件;模块化要求对本体元素之间的耦合性进行必要的解耦,有利于本体元素的灵活组合;重用性使本体各元素可以方便地应用于不同的领域,或者能通过简单的修改适应新的场景;可扩展性是本体功能不断成长,适应更复杂场景的基本要求。






