
我国岛屿总面积约8万平方千米,约占陆地面积的0.8%,面积大于500m2的海岛有6500多个,大部分无人居住。准确、可靠、系统的获取岛礁及其周边海洋信息数据,建立岛礁水上水下一体化高精度模型,实现岛礁信息的“数字化”和“透明化”,可为海洋经济发展、环境保护、权益维护提供科学的数据和信息依据。
由于波浪和潮汐原因,水边线会随时间不断变化,导致水上和水下数据在建模时存在数据空白区域。近年来兴起的船载水岸一体化综合测量技术,集成了水上激光扫描系统、水下多波束测深系统、全景影像采集系统和POS定位定向系统等实现水岸一体测量的综合测量技术,较好地实现了水深及地形数据的拼接与融合。但是该方案仍存在3个问题:①船载激光扫描系统对水上部分只能进行侧向扫测,被扫测对象顶部的区域容易造成扫测盲区。②当岛礁周边地形以滩涂为主且潮差较小时,船载激光测量与多波束测量成果之间存在浅水部分盲区。③无人岛礁缺失基准点,测量成果绝对精度较低,难以满足工程需要。采用小型无人机航空测量技术手段进行空中俯视扫测,可解决顶部盲区问题。有学者提出了合理利用高低潮差、基于水陆两用车的水岸一体综合测量技术、机载蓝绿激光水深测量技术等方案,可减少浅水地带的盲区。跨海高程传递手段是解决基准点缺失问题的常用手段,而无人岛礁一般距离岸边较远导致实施较为困难。探索一种新的系统综合高效解决上述问题成为当务之急。
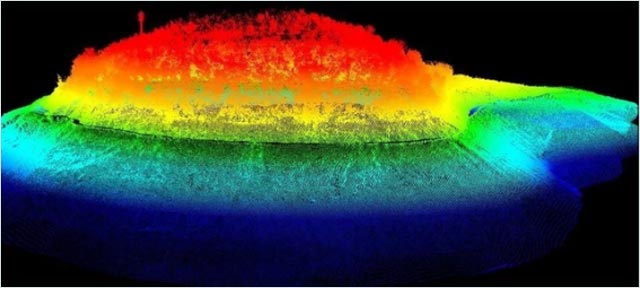
如今,无人机、无人船等海洋新型测量平台技术逐渐成熟,本文设计了一种基于无人机和无人船的岛礁地形测绘系统,分别搭载激光雷达、多拼相机、多波束测深仪等设备,在大地测量获取的高精度基准坐标基础上,合理利用潮位的高低潮差,并根据无人船吃水浅的特点,全面获取海岛礁的水上水下三维地形、三维模型,实现岛礁地形等值线提取和岛礁资产调查等功能,为有效维护岛礁主权和岛礁资产管理提供数据支持。
系统设计及创新点
⒈系统组成
基于无人机和无人船的岛礁地形测绘系统由大地测量分系统、机载分系统、船载分系统以及数据分系统组成。各分系统见图1。
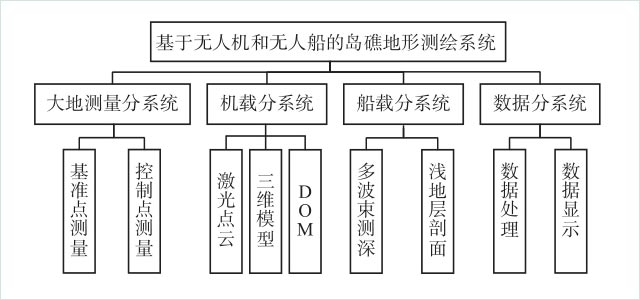
图1 系统组成示意图
⑴大地测量分系统
无人岛礁一般距离大陆较远,缺失基准点。导致无人机和无人船数据的相对精度较高,而绝对精度不足。因采用跨海高程传递较难实施,本文通过GNSS测量基站控制点的三维坐标。
大地测量分系统的主要作用是:①作为岛礁规划建设的依据和基准数据;②确保无人机航拍和无人船作业期间的RTK高精度位置定位及地面检核点(外部检核)的精确检核;③对无人机航摄、水下测量数据进行精确纠正;④对不同数据成果进行坐标转换。
⑵机载分系统
无人机航空摄影作为空间数据采集的重要手段,具有快速高效、机动灵活和成果精细的特点。面向无人岛礁等高危险地区,可以快速获取高分辨率正射影像和激光点云等数据。本文利用大地测量提供的高精度控制点信息,提高无人机测量绝对精度,成果可用于岛礁规划与施工。
机载分系统主要用于获取岛礁陆上部分成果。多拼相机用于获取真三维模型及DOM数据。在低潮时间段,通过无人机进行水陆交界处数据获取,可以扩大水上数据获取范围,提高与水下数据的重叠度,以提高数据拼接的精确度。
⑶船载分系统
相比大型测量船,无人船重量轻、体积小,具有机动灵活、吃水浅、能应对复杂环境等特点,非常适合近海岛勘测,可获取岛礁周边极浅区水深数据,为通航及开发提供必要的数据支撑。
船载分系统通过搭载多波束测深仪可以高效完成水下地形测量任务。同时搭载浅地层剖面仪可同步获取水下地质信息。
无人船在高潮时间段进行浅水测量,作业时尽可能至最浅水区作业。对于因水浅而无法测量到的区域,由机载Lidar或人工RTK补测。
⑷数据分系统
系统获取的多源数据如何处理、展示和分析是实现数据成果应用的重要一环。由于数据种类多、格式不同、水陆地理参考也不统一,在对这些数据进行处理与管理中,应建立统一的地理坐标系统,确定出工作时各传感器位置中心在地理坐标系下的位置和姿态信息,用于后续的空间配准,并根据不同要求对各类数据进行预处理,完成海底多波束与岛上点云数据的配准融合,形成完整的岛礁水上水下地形数据。
数据分系统采用Skyline Terra Explorerpro软件集成展示多源数据,可实现二三维数据加载、浏览、量测、图层控制等基本功能。利用多源的基础数据,还可模拟海水涨落潮、岛礁突发事件、应急响应、个性化专题数据展示等内容。依托软件构建的三维应用场景,叠加相应的专题信息,构建一个交互式应用成果,突出每一个岛礁地区特征,显示其数据成果、空间位置关系。

以上内容为高博特编辑选取的行业技术,尊重原创,如有侵权请联系删除。






