摘 要: 作战知识是提高无人系统的自主作战能力的重要因素。如何系统规范地存储和表示作战知识,使无人系统能够根据高层任务指令,自主完成任务规划,并基于不断更新的战场知识进行重规划和智能决策,是一个新的研究领域。首先,通过对任务规划领域概念、规划方法和知识表示方法的梳理,提出了基于本体的任务规划框架。然后,总结了本体在机器人、无人系统、军事任务规划等领域的应用情况,分析了当前研究的特点和不足,并提出了该领域的重要研究方向。最后,针对构建无人系统任务规划本体时应遵循的原则和需要关注的关键能力指标进行了论述。
0 引 言
当前,世界主要军事强国都将无人系统研究置于重要的位置,尤其是具备自主能力的无人系统[1-8]。能够完成复杂任务的智能规划和决策是自主能力的重要标志。
在美军的自主控制等级(autonomous control level,ACL)分级[6]中,ACL7级以上为高级自主性,ACL7级的定义为“编队战术目标”。吴森堂提出的导弹自主编队协同制导控制等级(cooperation guidance & control level for missile autonomous formation, CGCL)[9]对最高级自主性——自主自治的定义为能够进行“使命任务运筹和战术任务动态规划”。
“战术目标”和“使命任务”都是相对抽象的任务指令,这种任务指令往往仅明确了任务的目标或者最终状态,而为了达到任务目标应该执行哪些行动、如何执行等任务规划将由无人系统自主完成。
当前,无人系统任务规划的研究主要集中在任务分配和航迹/轨迹规划两个方面,将规划问题看作组合优化问题,在遗传算法[10-11]、粒子群算法[12]、蚁群算法[13]、多智能进化算法[14-16]等智能算法的辅助下完成问题的求解。但是,从本质上来看,任务分配属于调度问题[17],解决的是谁去做的问题,航迹/轨迹规划属于运动规划问题,解决的是如何去做的问题。对于一个任务来说,在解决怎么做和谁去做的问题之前,需要解决做什么的问题,这是任务规划需要完成的工作。例如无人机侦察打击任务,无人机完成这个复合任务需要根据所处状态判断执行起飞、机动到目标区域、打开传感器、搜索目标、打击目标、评估打击效果等子任务。这些子任务的规划属于符号规划问题,但当前无人系统自主处理和规划这些子任务的能力还很弱,针对此类问题的研究也很少。
实现这种智能规划能力的关键因素是知识和处理知识的能力[18-19]。这意味着需要一种能够形式化表示和处理战场环境、作战任务等知识的方法,使无人系统能够获取、表示和理解所需的战场知识,并根据获取的知识进行任务的智能规划。
本体技术是一种形式化的知识表示方法[20-21],在服务型机器人和自动化领域具有比较深厚的研究基础,在自主规划、抓取策略、智能空间认知等方面取得了大量的研究成果。军事领域中,本体技术在战场态势表示与评估、多源信息融合、作战计划表示与校验、决策支持等方面的应用较为成熟,并逐步应用到空间站短期规划、生物恐怖事件救援任务决策、舰空导弹防空任务规划中,促进了军事任务规划和决策智能化的发展。
近几年来本体技术开始应用于无人机、无人驾驶汽车和无人潜航器等领域中,在异构知识库集成、态势表示与评估、智能决策、驾驶意图预测等方面得到了有效应用[22-25]。
如何系统规范地存储和表示战场知识,使无人系统能够根据人类指挥员的高层任务指令,快速地获取战场知识和作战领域经验知识,自主完成任务规划,并在执行过程中进行任务的重规划和智能决策,已经成为一个新的研究领域[26]。
本文首先对任务规划领域的概念、方法和知识表示方法进行系统梳理,分析了任务规划领域的发展方向,提出了基于本体的任务规划框架。然后,介绍了本体在机器人自主化、军事任务规划领域的应用情况,明确了本体在任务规划中的作用,分析了当前基于本体的任务规划研究现状和存在的问题,并提出若干重要的研究方向。最后,论述了无人系统任务规划本体的构建原则和关键能力指标。
1 任务规划发展概述
1.1 任务规划领域概念
路径/航迹规划是在连续空间中规划一条从起始点到终点的可行路径,一般不考虑时间因素。无人机的航迹规划、无人车的路径规划都属于路径/航迹规划的范畴,是空间约束下的优化问题。
轨迹规划在跟踪空间位置的同时,还需要对速度进行跟踪。此外,轨迹规划通常考虑三维场景,如机械臂的运动规划通常是轨迹规划,不仅要满足空间约束,也要满足时间约束。
路径/航迹规划和轨迹规划统称为运动规划,其解决的是怎么做的问题。
任务规划的定义有多种,但总体上来说,任务规划是寻找使问题从初始状态转移到目标状态的一系列行动的过程[27]。任务规划主要解决做什么的问题,通过推理行动的结果,在一系列可能的行动中做出选择。
调度是在一段时间内为任务分配有限资源的问题[28]。调度是一种特殊的情况,在这种情况下已经选择了行动,只留下分配这些任务的问题。调度通常被看作是任务规划的子问题。
1.2 任务规划方法
(1) 经典任务规划范式。斯坦福问题求解器(Stanford research institute problem solver, STRIPS)[29]是第一个经典任务规划求解器,问题被描述为实现既定目标,提出了一种使用预先条件和效果表示可执行行动的算子,称为STRIPS算子。经典任务规划在早期人工智能研究中得到广泛的应用,但是这种方法没有明确的时间模型,无法表示任务的资源消耗和需求,无法表征不确定信息,且只能指定达到的目标。
(2) 分层任务网络(hierarchical task network, HTN)。采用递归方法将高层任务扩展为底层任务。扩展过程由称为“方法”的规则驱动,“方法”可以看作是从高层任务到部分有序任务网络的映射以及行动约束集合。HTN最大的优势是可以通过设计“方法”来控制任务分解的过程,而在经典的规划方法中行动的条件和效果只是明确了什么情况下可以使用该行动。HTN规划方法在实际问题中得到广泛的应用[30]。
(3) 决策论规划方法。决策论规划方法将规划问题建模为马尔可夫决策过程[31],这种规划方法中状态的转移是概率的,特别适用于处理不确定情况下的规划问题。但是,马尔可夫决策过程难以解决具有任务目标的规划问题。
1.3 任务规划领域知识表示与建模
(1) 任务规划表示语言。规划表示语言是实现任务规划的第一步,STRIPS算子兼有规划问题表示和操作的能力,实现了规划问题的规范化表示,使规划问题的求解更加方便。文献[32]提出的体系结构描述语言,是STRIPS的早期扩展版本,相对于STRIPS提高了表示能力,但是语义模糊没有获得广泛的应用。规划领域定义语言(planning domain definition language,PDDL)是一种标准化的任务表示语言,也是最常用的描述语言[33-34]。PDDL是一种纯符号化方法描述规划问题的语言,无法描述涉及导航等几何计算的子问题。概率PDDL(probabilistic PDDL,PPDDL)是在PDDL语言的基础上扩展而来,能够以概率方式表示行动的结果,具备概率规划能力。面向对象的规划语言[35],融合了面向对象编程的优点,通过一个特定的接口,扩展了符号规划结果的外部访问特性。
(2) 任务规划领域知识表示方法。Nau[36]和Knoblock[37]等开始了规划领域建模的工作,并指出任务规划中需要更好的知识建模方法和更丰富的规划知识。文献[38]和文献[39]针对一般任务构建了领域知识本体。Yolanda等人提出了一种聚焦计划表示(plan semantic net,PLANET)的本体[40],是一种聚焦计划表示的本体,通过将状态和行动的推理区别化对待的框架,通过映射规则实现非形式化文本中的语义, PLANET定义了计划上下文、目标、行动和任务,以及决策点等概念,并设计了联合作战空中任务指挥官本体、行动方针分析本体、对应变反应本体3种实用性的本体。但是,文献[38-40]也指出本体存在粒度无法支撑应用需要,缺少重要概念,没有考虑时间等问题。针对早期本体存在的这些问题,Rajpathak[41]等聚焦任务的形式化问题,形成了独立于特定领域、应用和推理方法的通用任务本体,明确了任务的初始状态、目标、计划、行动、代理、参数、时间域、约束、前提、成本函数、方案标准和规划模型等关键概念和准则。值得注意的是,Enrico提出的本体模型是基于业务概念建模语言(operational conceptual modelling language, OCML)[42],但是提供了从OCML转换到网络本体语言(ontology web language,OWL)[43]的机制,而在2004年OWL成为万维网联盟的推荐标准,并在之后成为比较重要和常用的本体建模语言。
(3) 不确定性知识表示方法。在现实世界中,特别是战场环境中,无人系统面临着处理大量不确定信息的情景,不确定性知识表示对于无人系统来说至关重要。当前处理不确定知识的数学理论主要有:模糊逻辑、贝叶斯网络、马尔可夫逻辑网络等。文献[44]将模糊逻辑引入到本体中,使用OWL2实现了模糊本体,通过概率注释方法表示信息的不确定性,能够表示模糊数据类型、模糊概念、模糊修饰符等模糊本体元素。文献[45]提出了一种从零开始构建模糊本体开发方法,并基于这种方法构建了一个海底环境的模糊本体。多实体贝叶斯网络(multi-entities Bayesian network,MEBN)[46]是贝叶斯网络的扩展,使用实体集合及实体之间的各种关系来表征环境中的不确定性。基于MEBN理论实现的本体技术,可以有效地解决推理问题,提高无人系统在任务执行过程中的应对能力,在欺诈检测[47]、海事预警[48]等领域都有应用,如图1所示。
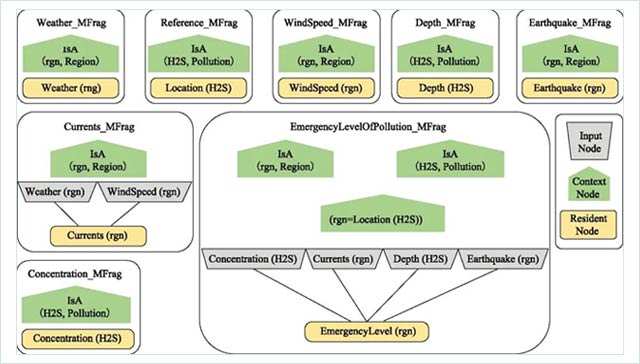
图1 用于估计海洋污染紧急程度的MEBN模型






