



跨界 · 融合 · 服务 · 创新

摘 要: 为研究长航时无人机发展趋势及面临的技术难题,对长航时无人机的发展现状及关键技术进行了分析与总结.长航时无人机留空时间长,作业覆盖区域广,在高空巡航作业时受天气和大气上下对流的影响小,具备广阔的应用前景.首先以常规动力和新能源动力分类,总结了当前国内外长航时无人机的主要型号,回顾了长航时无人机的发展历程.然后,根据长航时无人机高升力、高升阻比和缓失速气动需求,复合材料大展弦比机翼大柔性特征以及长航时无人机任务环境复杂等特点,总结了长航时无人机发展过程中亟需解决的关键技术难题,包括高效气动综合设计技术、大展弦比机翼气动弹性分析和主动控制技术、复合材料气动弹性剪裁技术、柔性飞行动力学建模和控制技术以及无人机自主导航技术等.最后,结合国外长航时无人机的发展特点,提出了我国长航时无人机的发展建议.研究表明:常规动力中空长航时无人机得到了比较广泛的应用,但新能源动力长航时无人机多数还处于研究样机研制阶段.续航时间在一周以上的“超长航时”无人机技术成为各航空强国关注的焦点.长航时无人机系统的智能化、协同化和网络安全是未来发展的主要方向.
关键词: 长航时无人机;气动优化设计;大展弦比复合材料机翼;非线性气动弹性;主动控制技术;飞行轨迹控制;自主导航
长航时无人机通常是指能在大气层内持续飞行24 h以上的无人驾驶飞机,飞行高度一般为7 000~20 000 m,被广泛地应用于军事和民用领域,执行侦察监视、搜索跟踪、灾情勘测、气象研究等任务[1-3].相比具有同样任务特点的低轨卫星和高空飞艇等飞行器,长航时无人机同时具备任务高度高、滞空时间长、机动性和自主性强等综合优势,适用于未来战争的信息化和自主化等特点,将在空间攻防和信息对抗中发挥重要作用[4],是无人机发展的重要方向.
近年来,随着材料、控制和动力推进等技术的发展,中国、美国、以色列、英国等已成功研制出多型长航时无人机.目前长航时无人机按其动力类型可分为常规动力无人机和新能源动力无人机.其中具有代表性的常规动力无人机包括美国“全球鹰”无人机、“捕食者”无人机[5]等;新能源动力无人机主要包括以太阳能为动力的美国“太阳神”系列无人机[6]和英国“西风”系列无人机[7],以及以氢能源为动力的美国“鬼怪眼”无人机[8]和“全球观察者”无人机[9]等.
长航时无人机系统除无人机平台外,一般还包括任务载荷、测控与信息传输、综合保障等分系统.本文重点对无人机平台设计相关关键技术进行讨论.长航时无人机的使用环境和任务要求与常规飞行器存在很大差别,对翼载荷、升阻比、结构质量系数、控制策略等提出了极高要求.本文结合长航时无人机发展的现状,对其所涉及的总体气动综合设计技术、结构设计技术和飞行控制技术等进行综述和分析,旨在为长航时无人机的发展提供参考.
1 长航时无人机概述
20世纪90年代以来,以美国为首的许多航空航天强国相继开始了长航时无人机的研究和开发,并取得了很大进展.目前为止,世界上已研制和正在研制的长航时无人机主要型号如图1所示.长航时无人机飞行高度主要集中在中高空领域,其中高空长航时无人机的巡航高度大于18 000 m.续航时间是长航时无人机的一个重要技术指标.目前常规动力长航时无人机能连续飞行24~40 h左右;新能源长航时无人机的设计目标是可连续飞行数周或数月以上.

图1 代表性长航时无人机
Fig.1 Representative long-endurance UAVs
1.1 常规动力长航时无人机
以航空汽油/煤油为燃料的常规动力长航时无人机主要采用涡扇发动机、涡桨发动机和带涡轮增压器的活塞发动机等[10].相比现有的新能源动力长航时无人机,常规动力长航时无人机具有载荷大、速度高、尺寸相对较小等特点.
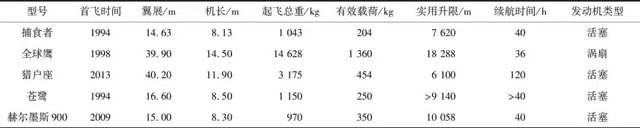
20世纪70年代,美国发起了Compass Cope计划,开始研发长航时无人机.20世纪80年代,波音公司成功研制“秃鹰”(Condor)常规动力长航时无人机.20世纪90年代,美国开展蒂尔(Tier)无人机研制计划,大力发展续航时间更长、覆盖范围更广的战略侦察任务无人机,“捕食者”(Predator)无人机和“全球鹰”(Global Hawk)无人机由此诞生.“捕食者”无人机由通用原子航空系统公司研制,于1994年首飞,续航时间为40 h.“捕食者”无人机1995年开始部署,并多次在局部战争中执行任务.此外,在科学研究、森林防火以及边境执法等民用领域“捕食者”无人机也发挥巨大了作用.“全球鹰”无人机是诺斯罗普 格鲁门公司为美国空军研制的涡扇高空长航时无人机,是目前世界上已列装的尺寸最大、质量最重的无人机.“全球鹰”无人机可以在海拔18 000 m左右高度执行任务,续航时间可达36 h[11].进入21世纪,“全球鹰”、“捕食者”及其改进型无人机在美军中大量装备,用于支援美国空军涉及的海外应急作战任务.2014年12月,美国极光飞行科学公司研制的“猎户座”(Orion)中空长航时无人机持续飞行了80 h 2 min 52 s,创造了常规动力无人机续航时间记录,该机型目标是在6 100 m的高空执行120 h的情报、监视与侦察任务.除美国外,以色列研制的“苍鹭”(Herons)无人机[12]和“赫尔墨斯900”(Hermes 900)型无人机可在10 000 m左右的高空,进行数十小时的持续飞行.国外典型的常规动力长航时无人机,如图2所示.部分代表性的常规动力长航时无人机关键参数,见表1.
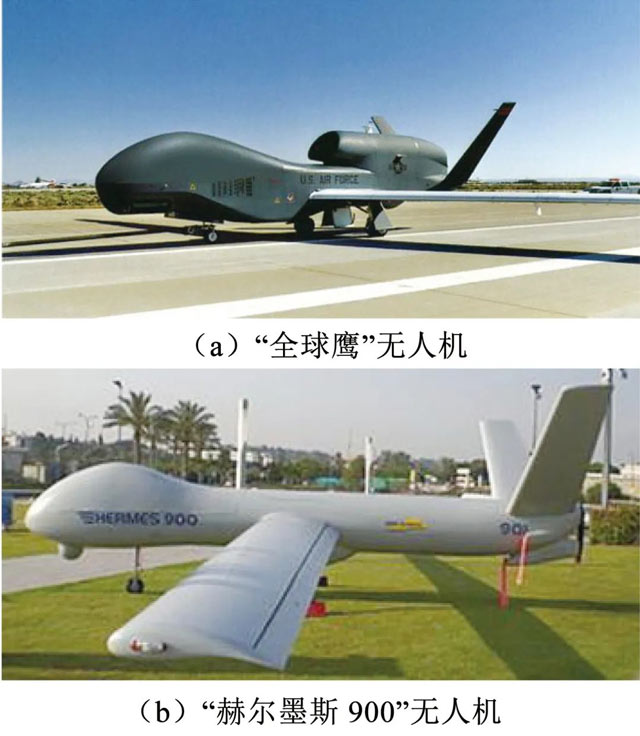
图2 国外典型的常规动力长航时无人机
Fig.2 Representative foreign conventional powered long-endurance UAVs
近20年,中国针对长航时无人机开展了相关技术研究和型号研制工作,并取得了较大进展.北京航空航天大学牵头研发的“长鹰”系列中高空远程无人侦察机,续航时间超过40 h,主要用于执行侦察任务和情报收集,该机于2015年纪念中国人民抗日战争暨世界反法西斯战争胜利70周年阅兵式上公开亮相.
1.2 新能源动力长航时无人机
液氢燃料的能重比约为普通燃料的3倍,属于高密度动力能源.近年来针对液氢燃料的长航时无人机的研究逐渐增多,但均处于试验阶段.“全球观察者”(Global Observer)是美国航空环境公司研制的高空长航时无人机系统,是世界上第1种采用液氢燃料为动力的无人机.“全球观察者-1”为全尺寸原型机,目标是在19 800 m的高空持续飞行120 h以上.2011年该机在爱德华兹空军基地进行的试验中,首次全程使用液氢燃料发动机,飞行高度1 500 m,持续飞行4 h.“鬼怪眼”(Phantom Eye)无人机由波音公司研制,采用2台2.3 L、4缸液氢推进系统.2010年“鬼怪眼”无人机首次完成了自主飞行,2013年实现了在8 400 m高空4.5 h的持续飞行,但是距离其96 h的设计飞行时间仍有很大差距[13].
表1 国外主要常规动力长航时无人机关键参数[11]
Tab.1 Key parameters of foreign conventional powered long-endurance UAVs[11]
新能源长航时无人机除采用氢能源外,还可以采用太阳能作为动力.太阳能无人机在光照条件下能够通过太阳能电池维持动力系统并储存电能,飞行高度高,续航时间长,是目前各国研究的热点.尽管相比常规动力无人机,太阳能无人机在飞行性能和有效载荷能力等方面有明显不足,但是在长航时续航方面优势明显,理论上可以实现无限时间巡航[4].目前,较著名的长航时太阳能无人机有美国航空环境公司与NASA联合研制的“太阳神”系列无人机,该系列无人机包含“探路者”(Pathfinder)、“探路者+”(Pathfinder-Plus)、“百夫长”(Centurion)和“太阳神”(Helios)等型号;英国国防部下属公司研制的“西风”系列无人机,该系列包括“西风6”(Zephyr 6)、“西风7”(Zephyr 7)和“西风8”(Zephyr 8)等型号.另外,瑞士苏黎世联邦理工学院研发的AtlantikSolar太阳能无人机于2015年创造了81 h的连续飞行记录,UAVOS设计的ApusDuo自主式太阳能无人机旨在实现365 d巡航的目标.国外具有代表性的新能源无人机及主要参数,如图3和表2所示.
近几年,中国相关院所和高校对太阳能无人机开展了设计研究,并进行了飞行试验.2019年7月,西北工业大学“魅影”团队研发的MY-12太阳能无人机,成功实现跨昼夜飞行,达到27 h 37 min,是中国目前已公开报道的续航时间最长的太阳能无人机.
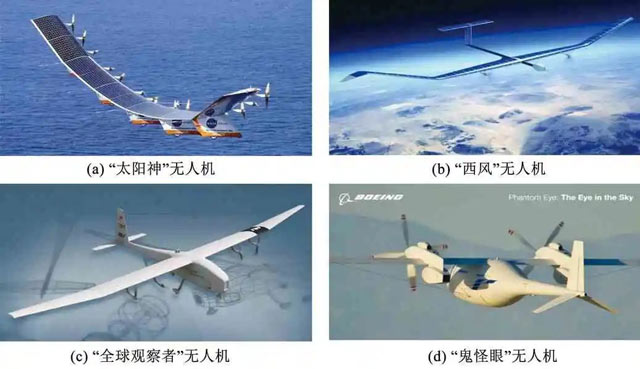
图3 国外主要的新能源长航时无人机
Fig.3 Representative foreign new energy powered long-endurance UAVs
表2 国外主要新能源动力长航时无人机参数[11]
Tab.2 Key parameters of foreign new energy powered long-endurance UAVs[11]
2 长航时无人机总体气动综合设计技术
长航时无人机的气动性能需要满足巡航时间和巡航高度的要求,总体气动综合设计是飞行器达到战术技术指标或使用技术要求的核心关键技术,决定了飞行器的整体气动性能和飞行性能.长航时无人机飞行高度较高,飞行环境中空气稀薄,飞行雷诺数较低,巡航时所需升力系数较大,且由于长航时飞行,要求机内储油空间大,巡航阻力小.因此,长航时无人机气动综合设计需要进行高升力、高升阻比、低雷诺数翼型优化设计研究和无人机高效气动布局研究.
2.1 高升阻比机翼优化设计
低雷诺数条件下,翼型在小攻角时就可能发生流动分离,翼型的升力线斜率也会降低,难以获得高升阻比[14],现有长航时无人机的升阻比通常在20以下,长航时无人机的代表“全球鹰”升阻比达到28左右.长航时无人机机翼通常采用小后掠角、大展弦比形式,机翼具有较弱的三维效应,因此二维翼型的气动特性对提高飞机的性能和飞行品质有直接影响,需要同时具备高升阻比、高升力和缓失速特性[15].常用翼型的类型主要包括:层流翼型、高升力翼型和超临界翼型等.具体翼型可以在现有的翼型库中选取,如NACA6A族、GAW系列、SD系列、Eppler系列[16]等,也可以以满足飞机设计任务指标为准则,基于翼型的流动特征和升力特性,通过优化设计得到.
2.1.1 翼型优化设计方法
低雷诺数是长航时无人机的重要气动特征之一.国内外学者分别通过试验和计算流体力学(CFD)方法进行了低雷诺数翼型气动特性的研究.结果表明,低雷诺数条件下翼型层流分离现象体现出强非定常特性,具有流动分离、转捩和再附等复杂流场结构特征[17],从而导致阻力系数陡增,最大升阻比快速下降,以及升力系数非线性效应[18]和静态滞回效应[19]等.
优化设计方法可有效地提高翼型的升力系数和降低阻力系数,使翼型具有更高的综合气动性能.长航时无人机翼型基本设计目标包括设计点升力系数、最大升力系数、失速特性(失速过程是否缓和)、最小阻力系数、设计点阻力系数、零升力矩、力矩线性范围等.翼型优化设计方法主要有两种:反设计法和最优化法.其中,反设计法是一种高效的设计方法.Zhu等[20]采用反设计方法设计了自然层流翼型,并用非接触测量方式对设计效果进行了实验验证.华俊等[21-23]应用反设计法对高升力缓失速翼型进行了优化设计,采用改进余量修正迭代方法,设计了升力线线性段延长,升力线斜率增加,失速特性缓和的有利于“高升力长航时”安全飞行的翼型.
最优化法将设计对象的气动分析与最优化方法相结合,通过不断改变设计对象的气动外形,使气动性能在满足给定约束条件下达到最优.最优化法设计流程如图4所示,基本思路为:基于Hicks-Henne型函数、Parsec Method和B-spline Curves等方法参数化翼型[24-25];在低雷诺数飞行条件下,对翼型气动性能进行分析;结合优化算法对参数化的翼型进行设计.数值模拟精度和优化算法是长航时翼型成功设计的关键.

图4 常用优化算法优化翼型流程图[26]
Fig.4 Schematic diagram of common algorithm structure for airfoil aerodynamic optimization[26]
翼型优化过程中常用的气动分析方法包括工程方法、基于势流理论的数值模拟方法、基于欧拉方程的数值模拟方法和基于N-S方程的数值模拟方法.在涉及到复杂流动问题以及结合多点计算的优化算法时,高精度的数值模拟需要耗费较大的计算资源,因此有研究人员提出了构建代理模型来代替气动分析数值模拟的方法,减小优化设计的计算量.代理模型的构造主要有:参数化方法,如Kriging方法和多项式回归法;非参数化方法,如径向基函数和神经网络等,相关研究详见文献[27-29].
目前常用的翼型优化算法主要有控制面法[30]、多目标遗传算法[31]、粒子群优化算法[32]等.针对长航时无人机翼型,Zhao等[33]通过求解考虑层流转捩的雷诺平均N-S方程,基于粒子群优化算法,构建了翼型综合优化设计平台,寻找可以应用于长航时无人机的最优自然层流翼型.Nikolaev等[34]基于遗传算法,利用翼展方向的升力系数分布对翼型进行优化,实现了低雷诺数条件下大展弦比机翼的准确计算与快速优化设计.
2.1.2 流动控制技术研究
采用适当的流动控制技术也是增大机翼升阻比的重要方法.目前国内外均已展开了低雷诺数翼型控制技术的研究,流动控制主要分为主动流动控制和被动流动控制.针对主动流动控制技术,Yang等[35]进行了低雷诺数下声激励主动流动控制技术的研究.Buchmann等[36]提出了前缘零质量射流对大迎角分离的控制技术.左伟等[37]和刘沛清等[38]分别应用合成微射流(Micro-SJ)和吹吸气技术,对翼面层流分离泡(低雷诺数下翼型的特殊流动现象)进行控制,推迟了失速迎角、增大了机翼最大升力系数和最大升阻比.由于主动控制技术需要利用加入外部能量对边界层进行控制,增加了额外复杂激励装置,因此,加大了长航时无人机应用该技术的难度.
被动流动控制方法具有耗能小、装置简单、实用性强、控制效果明显等优点,常用的被动流动控制方法有涡流发生器、沟槽壁面、前缘襟翼、后缘缝翼以及仿生机翼前后缘等[39-42].被动流动控制通过控制边界层流动状态,抑制了流动分离,提高了机翼升阻比,并改善了机翼失速特性.随着智能材料的发展,可变形机翼成为被动流动控制研究的重要分支[43],如图5所示.目前已有学者开展了长航时无人机可变形机翼技术的研究.

图5 后缘可变形机翼示意[44]
Fig.5 Morphing wing with a flexible trailing-edge[44]
Lafountain等[45]针对“全球鹰”无人机LRN 1050翼型应用了可变形机翼技术.研究了襟翼偏转和翼型弯度变形之间的关系,结果表明,应用机翼后缘弯度变形可以代替襟翼偏转对无人机的操纵,同时能保持较高的气动效率.Della[46]等通过飞行试验和参数化空气动力学分析,证明了自适应机翼后缘可以有效改善长航时无人机的飞行性能和地面性能.当前适用于长航时无人机的流动控制方案还需要进一步研究,但是主动和被动流动控制技术为气动优化设计提供了重要思路.
2.2 气动布局设计
2.2.1 气动布局方式及优化方法
高效总体气动布局是提高飞行器整体飞行性能的核心关键,也是实现可靠精准飞行控制的重要基础.长航时无人机气动布局与其动态特性和气动特性密切相关,不同的布局形式对无人机的飞行性能、稳定性和操纵性有重大影响.选择长航时无人机总体布局类型和参数时不仅要考虑每个部件的合适外形,还要考虑把它们组合在一起时,产生的气动干扰情况,并且可能需要采取多种技术措施进行综合权衡,才能实现满足设计要求和使用要求的最佳总体布置形式.
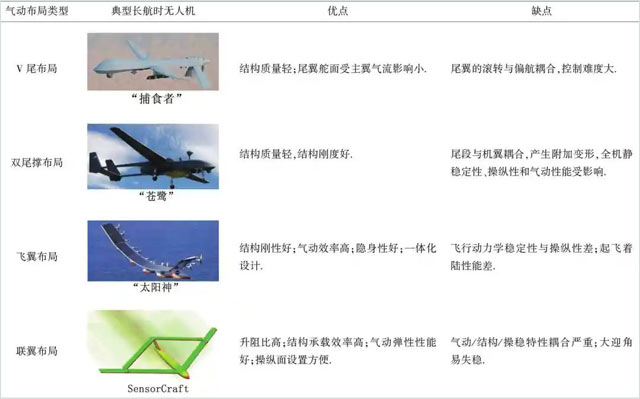
常规动力长航时无人机气动布局主要有:V尾布局(如“全球鹰”无人机)、双尾撑布局(如“苍鹭”无人机)、可变后掠翼布局、边条翼布局和联接翼布局等[47-49].太阳能长航时无人机气动布局有:常规布局(如“西风”无人机)、飞翼布局(如“太阳神”无人机)、分布式布局和串列式布局等.常见气动布局特点对比,见表3.
表3 长航时无人机常见气动布局对比
Tab.3 Comparison of aerodynamic layouts of long-endurance UAVs
目前翼身融合布局正成为常规动力无人机和太阳能无人机研究重点之一.翼身融合布局具有浸润面积和内部体积比低、光滑变截面分布、隐身性能好等特点,可以避免机身与机翼的相互干扰,消除翼身连接处复杂流动的影响,从而改善全机的升阻比等气动特性[50].Panagiotou等[51]对翼身融合布局的后掠角、展弦比和垂直机翼位置等参数进行研究,分析了翼身融合布局的气动效率和升力曲线斜率特性等.虽然长航时无人机,特别是高空长航时无人机,对隐身性要求不高,但是合理的在气动布局设计时考虑隐身性,可以显著地降低其RCS(雷达散射截面积),提高其生存力.例如,美国的“全球鹰”高空长航时无人机,采用背负式S弯进气道,减小飞机的头向雷达散射截面;将发动机布置在后机身内,并利用V形尾翼遮挡发动机尾喷口,进一步减小侧向散射截面,从而提高了全机的整体隐身性能.
长航时无人机气动布局方案确定后,需对布局参数进行优化设计.气动布局优化方法有梯度法、罚函数法、基于控制理论的优化方法和遗传算法等[52-54].由于遗传算法可以找到优化模型的全局最优解,在长航时无人机气动布局优化设计中得到了较多应用.Alsahlani等[55]基于遗传算法,针对飞翼布局太阳能长航时无人机,结合气动、结构和稳定性分析,搭建了气动布局设计与优化框架.梁煜等[56]将Kriging代理模型和Pareto遗传算法引入气动外形平面参数匹配设计,提出一种基于代理模型的多目标平面参数匹配设计方法,提升了优化的效率并保证了可信度.Panagiotou等[57]针对翼身融合布局长航时无人机设计提出了一种全面优化配置方法,用以解决翼身融合设计阶段遇到的问题.
2.2.2 螺旋桨/机身一体化气动设计
螺旋桨是多数长航时无人机的重要推进部件,根据对无人机的需求不同,螺旋桨布局有推进式布局和拉力式布局,如图6所示.高空飞行时,由于大气稀薄,雷诺数降低,还需要针对螺旋桨在低雷诺数下的气动性能和翼型设计展开研究[58-59].

图6 螺旋桨发动机的不同布置类型
Fig.6 Different arrangements of propeller on UAVs
对于前置螺旋桨,Traub等[60]研究发现,机翼、机身等部件在螺旋桨滑流作用下的气动特性与无滑流状态下有较大差异,同时螺旋桨布置位置对全机气动特性也有不同影响.对于螺旋桨产生的滑流流场的研究,需要考虑流场的加速效应、旋转效应、黏性效应、湍流效应和发动机位置等因素的影响[61-63].Catalano[64]进行了螺旋桨在不同位置和不同倾角时,正转与反转的诱导流对机翼气动力影响的试验,试验雷诺数分别为3.5×105和4.5×105.结果表明,螺旋桨正转时,转捩发生在机翼前缘附近,而螺旋桨反转时,转捩出现延迟.Rakshith等[65]研究不同机翼弦长受螺旋桨滑流影响的程度,并指出较短弦长的机翼有利于减阻.Ananda等[66]对以Wortmann FX 63-137为翼型的矩形机翼进行了低雷诺数流动风洞试验,研究表明螺旋桨滑流诱导了湍流的早期过渡,导致了分离泡过早形成.Aref等[61]研究了不同攻角、安装位置以及旋转方向的螺旋桨对机翼气动力的影响,采用CFD方法对流场进行了分析,得到的涡结构如图7所示.

图7 螺旋桨在机翼内/外侧时的涡量等值面图[61]
Fig.7 Vorticity isosurfaces with propeller installed inboard/outboard[61]
对于螺旋桨在机身后方的布局形式,需要考虑螺旋桨对机身的反作用.陈广强等[67]对螺旋桨装布置在V尾后方的高空长航时无人机流动特性进行了数值模拟,研究表明螺旋桨尾流的干扰使无人机机身尾部的压差阻力迅速增大,导致无人机气动性能变差.另外,在低雷诺数条件下无人机平台表面流动容易发生分离,也会使螺旋桨推进效率降低[68].因此,必须考虑螺旋桨与全机的气动性能相互干扰,进行螺旋桨/机身一体化设计[69].
3 长航时无人机结构设计技术
长航时无人机普遍采用轻质复合材料大展弦比机翼,使得结构质量减轻,诱导阻力减小,但是复合材料结构柔性显著降低了大展弦比机翼的整体刚度,使得气动弹性稳定性问题异常突出[70-71].长航时无人机结构设计需要同时满足结构强度、刚度、静/动气动弹性等多个方面的约束.因此,大展弦比机翼气动弹性建模和分析、复合材料机翼气动弹性剪裁以及考虑复合机翼机身制造的结构优化设计是长航时无人机结构设计的关键技术问题.
3.1 大展弦比机翼气动弹性分析
长航时无人机飞行过程中,机翼结构大柔性会引起几何非线性,导致气动载荷重新分布,翼面局部攻角增加,气流更容易发生分离,引发气动非线性特征,最终导致复杂的非线性气动弹性问题,此外,结构柔性的增加还会导致飞机颤振边界的提前.2003年,“太阳神”无人机在试飞中经历严重的非线性气动弹性问题,最终解体,如图8所示.NASA在随后的调查报告中,事故原因被认为是缺乏对飞行大变形情况的分析.
3.1.1 非线性气动弹性建模
对于大柔性飞行器全机气动弹性分析而言,其结构具有局部非线性特征,机翼变形较大,几何非线性特征明显,但机身变形仍保持线性特征.机翼、机身和尾翼通过边界协调条件实现各部件的相互连接.因此对机翼建立准确的非线性气动弹性模型尤为关键.建立大展弦比机翼气动弹性模型需要耦合结构模型和气动模型,常用的结构和气动模型如图9所示.

图8 “太阳神”无人机非线性气动弹性问题
Fig.8 Nonlinear aeroelastic of the “Helios” UAV
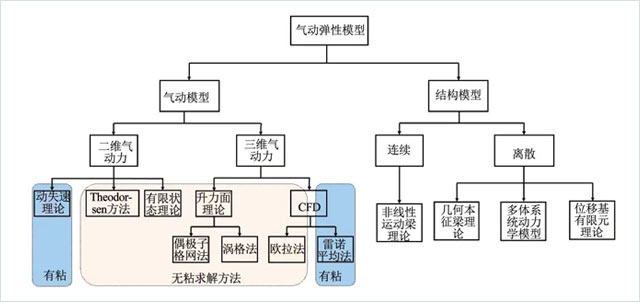
图9 常用气动/结构分析模型
Fig.9 Common aerodynamic/structural analysis models
在常用的结构动力学模型中,非线性运动梁理论和几何精确本征梁理论对于简单梁结构有较好的求解精度和较高的求解效率,但是难以处理复杂结构模型.非线性位移基有限元方法比较成熟,在复杂模型适用性和求解精度上都有较好表现,但求解效率低下.常用的气动模型特点和适用范围见表4.
表4 气动模型对比
Tab.4 Comparison of aerodynamic analysis models

不同的结构模型和气动模型相结合,最终得到不同方程形式的气动弹性模型.如基于非线性运动梁理论,气动弹性方程可以表示为
![]()
对于几何精确本征梁模型,其结构模型为一阶形式,因此气动弹性方程可以表示为
![]()
对于多体系统动力学方法,气动弹性方程如下:

Φ(q,t)=0,
式中,q=[qstru qaero].其中:qstru为气动弹性方程结构位移变量;qaero为气动弹性方程气动变量,具体定义依据气动模型的选取.
3.1.2 非线性静/动气动弹性分析
大展弦比机翼易发生大的弯扭变形,导致无人机结构和气动特性发生变化,引发气动弹性发散和操纵效率降低甚至反效等静气动弹性问题,严重危害无人机飞行安全.
Smith等[78]和Garcia等[79-80]分别基于几何精确本征梁理论和三维几何非线性梁理论,结合Euler求解器,研究了大展弦比柔性机翼的静态气动弹性特性,Garcia[79]对跨声速下大展弦比平直翼和后掠翼的静气动弹性进行了研究,探讨了跨声速阻力和结构弯扭耦合的关系.国内西北工业大学周洲团队也开展了相关研究[81-83],通过编写计算结构力学和计算流体力学耦合求解器,研究了类似“太阳神”布局无人机的静气动弹性问题.研究表明,此类无人机受载变形会降低升阻比,增大滚转、偏航力矩导数,引起气动载荷的重新分布向翼根转移,但是静气动弹性变形可以有效缓和存在的纵向静不稳定现象,同时显著改变全机的横航向稳定性等.
对复合材料大展弦比机翼动气动弹性问题,国内外学者的研究主要集中在动气动弹性稳定性和气动弹性动响应领域.分析大展弦比机翼动气动弹性稳定性问题,通常采用等效梁板模型.刘湘宁等[84]基于结构几何非线性的大变形欧拉梁和片条理论,建立了大展弦比复合材料机翼的非线性气动弹性分析模型,分析了铺层角、展弦比、机翼线密度等参数对颤振速度的影响,并且以机翼颤振速度为目标函数对大展弦比复合材料机翼进行气动裁剪设计.Attaran等[85]使用有限元方法,分析了机翼展弦比、后掠角以及铺层顺序对颤振速度的影响.Kameyama等[86]采用变截面的复合材料板模型建立非线性气动弹性模型,研究了机翼的颤振发散特性,并且利用遗传算法对复合材料机翼结构进行了优化.
针对气动弹性动响应问题,Cesnik等[87-88]和Brown等[89]开发了气动弹性仿真框架.在此基础上,Su等[90-91]引入了阵风模型.对柔性飞机的配平、纵向稳定性和阵风响应,以及翼身融合布局飞行器阵风响应和颤振特性进行了详细研究.Tang等[92]基于非线性梁理论和ONERA失速模型,对大展弦比柔性机翼的阵风响应进行了研究,探讨了阵风分布的影响.Patil等[93-95]考虑气动弹性非线性,对不同展弦比柔性机翼的极限环振荡特性进行了研究,并提出了主动控制方法.Kim等[96]在Crespo非线性梁模型中加入了外挂,研究了外挂质量、外挂惯性和外挂位置对机翼极限环振荡特性的影响.Zhang等[97]研究发现,在不发生失速的情况下,结构的几何非线性可以导致大展弦比机翼出现极限环振荡,随着飞行速度的增加,动态失速成为主导,极限环现象变得更加复杂.
长航时无人机面临复杂的非线性气动弹性问题,一方面需要建立更加准确的模型,结合结构设计进行被动气动弹性控制;另一方面可采用主动控制技术进行气动弹性控制,该内容将在气动弹性主动控制中进行详细介绍.
3.2 复合材料机翼气动弹性剪裁
气动弹性剪裁技术使用控制刚度方向的方法,来控制静态或动态的气动弹性变形,从而使飞行器的气动和结构性能向着有益的方向发展.长航时无人机大多采用了轻质、高强度和高模量的先进复合材料结构,具有良好的可设计特性.气动弹性剪裁技术可以在满足气动弹性要求的前提下,最大限度地降低机翼结构质量,是飞行器结构设计的关键技术之一.
气动弹性剪裁本质为约束优化问题,一般流程如图10所示.结构质量经常被设为优化的目标函数,约束条件可能是结构在外部载荷作用下的强度条件、刚度条件或气动弹性约束条件等[99].Guo等[100]以强度、损伤容限和气动弹性稳定性为约束,提出了大型飞机复合材料机翼多目标优化方法.将蒙皮层数和铺层角度作为设计变量,优化完成后的机翼满足实际设计的生产要求,同时结构质量减轻了30%.万志强等[101]研究表明,使用遗传/敏度混合优化算法可以较好实现强度、位移、发散速度和颤振速度等约束条件下的质量最小设计.

图10 气动弹性剪裁多目标优化流程图[98]
Fig.10 Multi-objective optimization flow chart of aeroelastic tailoring[98]
长航时无人机机翼由于柔性特征明显,颤振临界速度经常成为约束无人机性能指标的重要因素之一.白俊强等[102]提出了三级结构优化方法,在满足强度和变形约束的条件下,将梁、肋和蒙皮厚度作为设计变量,进行第1级结构质量优化.以颤振速度为约束条件将铺层顺序进行优化,完成第2级结构质量优化.最后,在不改变质量的前提下,采用遗传算法优化复合材料铺层顺序,增大了机翼的颤振速度.刘湘宁等[103]以颤振临界速度作为目标函数,建立了非线性气动弹性模型,研究了两种不同截面的复合材料机翼颤振速度与铺层角的关系.使用罚函数内点法和导数优化方法变尺度结合求解,进行气动弹性剪裁优化,优化后的机翼颤振速度提高了22.77%.
3.3 复合材料机翼/机身结构设计
长航时无人机的结构设计主要包括机翼、尾翼、机身、发动机吊舱和起落架等机体结构设计和操纵系统设计.结构设计方案需要根据结构使用条件、外形尺寸、初步确定的结构形式以及各种协调关系,通过设计、分析、试验等方式确定.大展弦比复合材料机翼结构设计的核心是在机翼厚度、结构强度与稳定性、气动弹性变形以及颤振速度等多约束条件下,寻求综合性能最优的结构方案.
长航时无人机机翼外形参数以及机翼机身相对位置初步确定后,需要明确机翼结构参数.机翼结构可以选用蜂窝夹层、多墙式和混合式结构[104].张纪奎等[105]的研究表明:蜂窝夹层结构具有密度小、刚性好、减震性和抗疲劳性强等特点,并且有利于气动弹性剪裁设计;多墙式结构在相对厚度较小的机翼结构中能够充分利用蒙皮来承受较大弯矩;混合式结构同时综合了多种结构特点,有较好的方向可设计性,通过合理的刚度分配,可实现较小的结构质量.
为了得到机翼结构最优设计方案,需要基于结构分析方法或结构试验方法,对其性能进行分析,通过设计复合材料铺设角度、铺层厚度、铺层比例等变量,合理分配机翼结构刚度,最优化机翼性能.刘峰等[106]应用准等强度设计思想对大展弦比机翼进行了复合材料铺层设计与优化,随后利用有限元软件进行分析与校核,优化后的机翼结构减重达5.23%.杨龙[107]针对机翼主梁碳纤维铺层厚度与机翼结构动力学特性的关系进行了研究,发现机翼刚度与碳纤维厚度并不是正相关,而是存在厚度的最佳值.Meddaikar等[108]基于NASTRAN有限元软件分析机翼结构性能,以机翼最大翼尖位移为目标函数,使用遗传算法优化了复合材料铺层顺序,并通过风洞试验验证了分析结果的可靠性.Vio等[109]和Gauthier-Perron等[110]通过优化机翼结构参数,提高机翼刚度,实现了被动阵风载荷减缓.Park[111]等针对高空长航时无人机,采用碳纤维增强环氧树脂复合材料圆柱管和隔板作为大展弦比机翼翼梁,如图11所示,实现机翼轻量化设计,并使用非线性有限元数值分析方法和静强度试验对其研制的机翼进行结构强度分析,验证了所研制机翼满足设计性能要求.
机翼机身连接处的设计是飞机设计中的难点之一,界面复杂,连接件多且装配问题突出,合理地设计翼根连接件对减少装配工时和减少零件修配有很大作用[112].长航时无人机大展弦比机翼因根部弯矩和弹性变形较大,给机翼结构翼身连接设计带来较大难度.无人机传统的翼身连接多为集中接头式,传力路线为机翼弯矩和剪力通过接头耳片到机身框.由于长航时无人机机翼根部弯矩大,工程上翼身连接设计一般采用可以实现机翼弯矩的自平衡的翼身连接方式,如中央翼贯穿机身的结构型式.中央翼结构型式的无人机机翼和机身框之间只传递剪力,可有效减轻机身框的质量,但也会影响机身的传力路线[113].“捕食者”无人机采用了一种主梁弯矩自平衡的连接形式,即在翼身连接区,两侧机翼的主梁重叠,左侧机翼的主梁相对右侧机翼的主梁偏移,并通过两轴销相互连接,实现弯矩自平衡,并与机身隔框相连传递剪力.

图11 大展弦比碳纤维复合材料机翼强度试验与分析[111]
Fig.11 Strength test and analysis of high-aspect-ratio carbon fiber composite wing[111]
此外,长航时无人机机翼结构设计过程中还需考虑结构的制造工艺性和维护便捷性.Benjamin等[114]基于Lattice晶格结构,实现复合材料机翼的分块制造与拼装,使得机翼具有轻量化、检修方便的特点.胡江波等[115]根据给定的机翼外形结合有限元分析和制造工艺性分析确定了直梁式机翼结构布局方案,并且通过增加后缘胶接区域的预浸料填充物,使得机翼的破坏载荷提升了18.95%,载荷质量比提高了13.15%.向锦武等[116-117]针对复合材料机翼制造和维修方法,提出了新的复合材料机翼防固化变形模具设计方法和开口补强设计方法.
4 长航时无人机飞行控制技术
高精度、高抗扰飞行控制是无人机实现安全精确着陆、精细侦察与监视、高分辨率遥感、自动攻击控制、自动空中加油对接控制的共性关键技术,对于无人机的发展具有重要的推动作用.长航时无人机采用大展弦比柔性机翼,机翼非线性气动弹性低频振动易与无人机飞行动力学产生耦合,导致复杂非线性飞行动力学行为,气动弹性颤振不稳定性成为危及飞行安全的首要因素,因此,柔性飞行动力学建模和主动气动弹性控制技术尤为关键;长航时无人机作业区域广,飞行高度高,自然环境和电磁环境多变,飞行控制和导航系统的稳定性和精度要求更高,必须进行无人机轨迹控制和自主导航技术的研究.
4.1 柔性飞行动力学建模
长航时飞行器具有机翼展弦比大、刚度低的特点,是典型的柔性飞行器,因此需要考虑机翼弹性对动力学分析的影响,进行无人机稳定性、操纵性分析与飞行控制律设计.张健等[72,118]针对柔性飞行器飞行动力学和结构动力学耦合的飞行动力学建模进行了相关研究,说明了耦合求解的重要性.目前,适用于大柔性飞行器飞行动力学建模的方法主要有平均轴系法(mean axes)[119-120]和准坐标系法(quasi coordinates)[121],两种方法都是在体轴系中描述飞行器的弹性变形,区别在于对体轴系的定义不同.
国内外学者均开展了基于平均轴系法对柔性飞行器建模以及柔性飞行器动力学特性分析.Damveld等[122]和Silvestre等[123]基于平均轴系法对柔性飞行器进行了建模,分别实现了柔性飞行器的操纵品质的分析和俯仰角速度的控制.Patil等[124]对飞翼布局长航时无人机进行了动力学建模与分析,在大变形中引入小应变假设,使模型可用于稳定性分析和非线性仿真.国内主要有西北工业大学周洲等[125-127]对太阳能无人机进行了动力学建模,并分析了高空长航时无人机的纵向动力学特性.研究表明,在纵向稳定性方面,由于弹性变形和集中载荷的影响,无人机的短周期频率减小且阻尼增大,长周期运动与结构变形运动发生耦合,导致长周期的阻尼减小.王睿等[128]研究了大展弦比多螺旋桨飞行器的航向气动特性,基于航向小扰动方程进行了飞行器的动态特性分析,研究表明多螺旋桨可以显著改善飞行器的荷兰滚模态和螺旋模态特性.李锋等[129]建立了风场作用下的高空太阳能飞行器的横航向动力学模型,探究了稳定风场对无人机横航向特征根的影响.研究表明,稳定风场存在下横航向模态特征根与无风时相同,但横航向模态特征矢量中侧向速度对应的相应存在差异.
准坐标系法可以方便的描述飞行器的刚性运动和弹性变形的关系,目前有学者采用该方法进行了柔性飞行器的动态特性研究.Haghighat等[130]基于准坐标系方法建立了长航时无人机动力学方程,并进行了阵风响应分析.Chang等[131]基于准定常气动力方法,对全机动力学特性进行了研究,分析了机身质量分布、机身长度以及平尾位置对柔性飞行器的纵向特性影响,指出俯仰惯性随着机身长度的增加而增加,从而导致纵向短周期模态变得不稳定.此外,郭东等[132]则结合了平均轴系和准坐标系两种方法的优势,提出了“瞬态坐标系”法,该方法利用拉格朗日方程和有限元思想推导大柔性飞行器的动力学模型,充分考虑柔性飞行器气动力、结构、控制和飞行力学之间的交叉耦合特性,为动力学特性分析提供了理论基础.
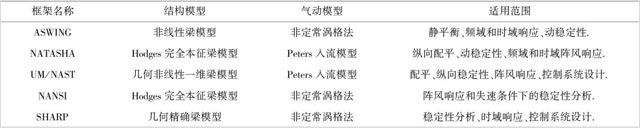
随着大展弦比柔性长航时无人机刚柔耦合问题研究的开展,逐渐发展出若干柔性飞行器非线性气动弹性与飞行动力学耦合仿真工具/框架.目前主要的仿真工具/框架包括:ASWING[133]、NATASHA (nonlinear aeroelastic trim and stability of HALE aircraft)[134]、UM/NAST (the university of Michigan’s nonlinear aeroelastic simulation toolbox)[87]、NANSI(nonlinear-aerodynamics/nonlinear-structureinter-action)[135]以及SHARP(simulation of high aspect ratio planes)[136]等.各仿真工具/框架的特点和适用范围见表5.
表5 柔性飞机非线性气动弹性与飞行动力学耦合仿真工具/框架
Tab.5 Coupling simulation tools/frames for nonlinear aeroelasticity and flight dynamics of flexible aircraft
4.2 气动弹性主动控制
由于各种非线性因素,柔性飞行器线性气动弹性系统会产生极限环振荡、混沌等一系列不稳定现象,对飞行器结构和飞行安全造成很大隐患.长航时无人机主动控制技术(active control technology)采用驱动装置消除气动弹性不稳定性的影响,主要包括主动颤振控制和阵风减缓控制.常规飞行器的气动弹性主动控制研究,详见文献[137-139].对于长航时无人机,目前主要的控制器包括:线性二次调节(linear quadratic regulator,LQR)、线性二次高斯控制器(linear quadratic gaussian,LQG)、静态输出反馈控制器(static output feedback,SOF)和PID(proportional integral derivative)控制器等.由于长航时无人机飞行特性的不确定性,自适应控制正受到广泛关注[140-142].
大展弦比机翼应用主动控制技术可以提高颤振速度,扩大长航时无人机的飞行包线.Patil等[95]提出了最优恒增益SOF控制器的设计方法,用于高空长航时无人机大展弦比机翼阵风减缓和极限环振荡控制,其结果表明,控制器在不同位置时具有不同的控制效果;SOF控制器与LQR和LQG控制器相比具有相似的增益和相位裕度.Cesnik等[143]开展了高空长航时无人机机翼的颤振控制研究,对传感器类型、作动器分布进行优化,研究表明处于合适位置的应变传感器可以对大展弦比机翼颤振进行控制.Afonso等[144]结合非线性气动弹性分析模型,设计了抑制大展弦比机翼气动弹性失稳的控制律.Zhao等[145]将柔性飞行器视为反馈控制下的多体系统,研究了气动弹性、飞行动力学和控制的耦合作用,结果表明,该方法可以控制柔性飞行器操纵时的极限环振荡现象.
阵风减缓主动控制,可以降低机翼载荷,延长结构寿命,并改善飞行器操控稳定性等品质.Dillsaver等[146]使用线性降阶模型对长航时无人机X-HALE的动力学系统进行降阶,通过设计LQG控制器实现阵风减缓.仿真结果显示,阵风引起的机翼曲率峰值降低了47%,机翼均方根曲率降低了83.7%.Wang等[147]针对长航时无人机阵风减缓问题,使用SOF控制器,抑制无人机柔性变形.仿真结果表明,阵风条件下翼尖最大位移减小了33%.Cook等[148]研究了柔性飞行器后缘控制面的阵风抑制问题,通过设计线化控制器,使得该飞行器离散阵风下的根部弯矩减小了9%.Wang等[149]开发了非线性气动弹性伺服框架用于柔性飞行器的飞行模拟,其设计的H∞控制器,可使飞翼布局的柔性飞行器在不同的阵风条件下保持稳定.Zeng等[150]设计了自适应前馈控制系统,并以F/A-18主动气动弹性机翼模型为对象,验证了方法的可行性.陈磊等[151]针对大展弦比多控制面弹性机翼风洞模型,从频域和时域进行了阵风响应分析,使用PI控制器进行阵风响应减缓控制律设计.仿真和风洞试验结果表明,在各设计控制律下,翼尖的加速度减少了10%以上,并且在速度较高时的减缓效果优于低速时的减缓效果.
4.3 无人机飞行轨迹控制
长航时无人机飞行动力学是高阶非线性系统,对扰动敏感,在保证控制系统能完成控制目标的同时还要求其具有较强鲁棒性,因此飞行轨迹控制系统设计难度较大.工程实际应用中,考虑到飞行器做姿态运动时受到物理舵面偏转的限制,在设计控制系统时还应考虑受限算法[152].
早期长航时无人机轨迹控制系统设计,主要在稳定风场假设下展开.Silvestre等[123]基于刚体近似理论,将柔性模态作为扰动加入控制系统中,设计了输出反馈控制器,实现了大柔性飞行器的俯仰角速率跟踪.Haghighat等[153]设计了应用于长航时无人机的多目标鲁棒控制器,使用线性矩阵不等式方法将控制器设计描述为凸优化问题,当配平速度变化时,在鲁棒控制器作用下,长航时无人机的稳定性和闭环系统性能仍能保持良好.Che等[154]针对强刚柔耦合的轻质结构大展弦比柔性飞行器设计了L1增广自适应控制器,该控制器用于保持飞行器巡航高度以及抑制机身颤振,其结构框图如图12所示.结果表明,L1自适应控制器能够在30~130 psf之间保持稳定并且达到良好的性能指标.
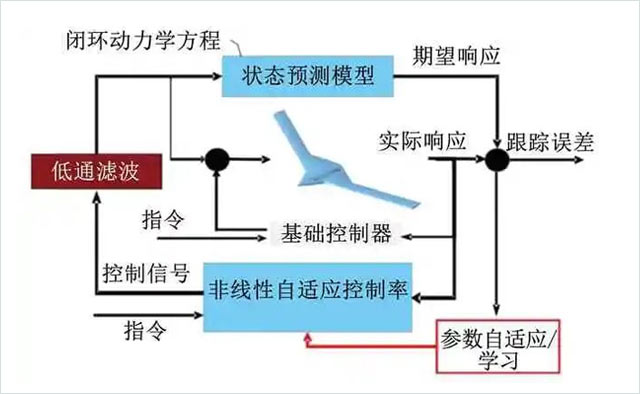
图12 长航时无人机L1自适应轨迹控制器框图[154]
Fig.12 L1 adaptive trajectory control architecture of long-endurance UAV[154]
Shearer等[155]在六自由度机体坐标系下设计了大柔性飞行器的双闭环轨迹控制算法.飞行器控制器分为内外回路,外回路采用PID结合非线性变换控制,主要进行轨迹倾角控制,产生的输出作为内回路的控制输入.内回路对横侧向和纵向运动进行解耦控制,纵向采用动态逆控制器,横航向采用线性二次型控制器,主要用于控制飞行器线速度与角速度.Zheng等[156]将高阶大柔性飞行器模型降阶,对降阶模型设计标称LQG控制器,在此基础上考虑系统鲁棒性设计了输出反馈自适应控制器.结果表明,控制器能够提高瞬态响应速度并且达到跟踪指标的要求.Sadat-Hoseini等[157]基于LQR和前馈闭环控制方法设计了大柔性飞行器着陆轨迹跟踪控制器,控制流程如图13所示,利用LQR跟踪着陆控制轨迹,引入积分器消除静态误差,使用前馈环节来减少可测量量的扰动引起的系统误差,成功实现了飞行器在稳定侧风存在时的降落轨迹跟踪.
长航时无人机飞行时受突风扰动影响较大,研究在突风环境下的轨迹控制方法有着重要的实际意义.Raghavan等[158]基于大柔性飞行器的降阶模型,采用多步非线性动态逆控制器结合非线性导引律,实现了对直线和曲线轨迹的成功跟踪,同时系统在有效载荷突变时仍能保持较好的飞行性能.Qi等[159]针对阵风干扰下的高空长航时无人机设计了双闭环控制系统.外环采用线性自抗扰LADRC控制器,内环则采用H∞控制器跟踪外环控制器产生的姿态信号,并采用粒子群优化算法对H∞中的加权矩阵进行参数优化,提高了系统鲁棒性,比采用传统PID控制器的轨迹控制方法有更快的收敛速度和更小的超调量.Dillsaver等[160]设计了阵风扰动下的大柔性飞行器纵向轨迹控制器.纵向控制内环采用动态逆控制器,外环采用高增益PID或LQR控制器,实现了飞行器的高度稳定控制.横航向控制采用LQG控制器,实现了对航向角度控制指令的跟踪.
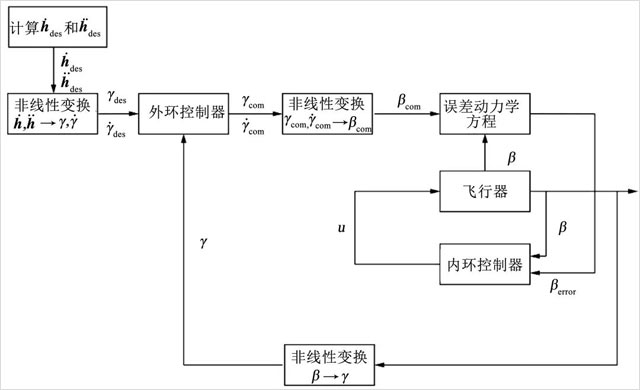
图13 长航时无人机抗阵风纵向轨迹控制器框图[157]
Fig.13 Anti-gust longitudinal trajectory control architecture of long-endurance UAV[157]
4.4 无人机自主导航技术
长航时无人机在飞行过程中要同时应对复杂的自然环境和电磁环境,对无人机导航系统的稳定性和精度提出了很高的要求.目前在无人机上采用的导航技术主要包括惯性导航、卫星导航、星光导航、地形辅助导航等,但是单一的导航方式并不能满足长航时无人机全天候长时间准确导航定位的需求,因此必须根据具体任务场景设计组合导航系统方案.组合导航把多种导航系统有机连接,使各系统性能互补,提高导航性能.
惯性/卫星组合导航系统[161]是目前无人机广泛采用的自主导航技术,能提供陆地、海洋和空间的全天候、全时间、连续的三维位置、三维速度和时间信息,惯性/卫星组合导航系统是可以有效地提高惯导系统的性能和精度,提高卫星导航系统接收机动态特性和抗干扰性.另外,惯性/卫星组合导航系统可以实现一体化,以进一步减少系统的体积、质量和成本,减小非同步误差.惯性/天文组合导航系统也是一类具有较高精度的自主导航技术.惯性系统用于解算天文导航系统所需的基准地平线方向,决定了导航系统的定位精度[162],天体导航系统基于天体的确切位置和地球运动规律,观察飞行器相对于天体的精确坐标解算飞行器位姿,该类导航系统具有隐蔽性好、定位能力准确、自主能力强等特点[163].此外,Yang等[164]提出了一种用于长航时无人机的基于惯性/卫星/天文导航的组合导航系统,实现了姿态角误差±0.25°,位置精度±2.4 m的定位效果.周姜滨等[165]对捷联惯性导航系统、全球定位系统、“北斗”卫星导航系统和大气数据系统在高空长航时无人机导航系统中应用的可行性进行了分析,提出了组合导航系统方案,并建立了组合导航系统的状态方程和量测方程,设计开发了组合导航仿真系统.
为了提高导航系统的可靠性和硬件冗余度,保证飞行安全,一方面可以采用容错技术以提高其飞行控制系统的可靠性[166].在紧急情况下,可采用容错控制器(FTC)帮助飞机保持一致的控制,并采用故障检测和隔离(FDI)方法来解决子系统的故障和故障.FDI技术分为基于模型的技术,主要采用参数辨识、联合滤波和人工神经网络等方法[167-168];基于信号的技术,主要应用主成分分析(PCA)、信号频谱分析等方法[169].另一方面,需要深入开展无人机防诱骗、防捕获技术研究,如果机载导航数据受到欺骗式干扰,如卫星导航数据受到渐进式干扰,组合导航系统将无法准确报告无人机准确位置.导航系统是无人机系统防欺骗、防捕获的薄弱环节.国内向锦武团队[170]提出了一种基于卫星通信的无人机导航数据防欺骗方法,用于在地面识别导航数据是否受欺骗,提高了长航时无人机在对抗环境中的可用性和实用性.
5 结 论
1)长航时无人机系统的成功研制与应用,离不开能源动力系统.目前常规动力中空长航时无人机发展迅速,取得了比较广泛的应用,新能源动力长航时无人机多数还处于样机研制阶段,离实际应用还有一定的差距.提高常规动力长航时无人机的飞行高度是未来发展的主要方向之一.
2)续航时间在一周以上,称为“超长航时”的无人机技术成为各航空强国关注的焦点.要实现超长航时飞行,通常采用超大展弦比(>30)气动布局,浸湿面积极大地降低甚至取消单独的机身.同时提高无人机飞行高度和续航时间是增加无人机实用性和可靠性的关键.
3)超大展弦比气动布局和轻质材料结构导致无人机呈现“大柔性”,引发气动、结构出现本质非线性、强耦合和不确定性,无人机对外部环境激励和内部状态变化极其敏感,气动弹性颤振不稳定性成为危及飞行安全的首要因素,给气动布局、结构构型和飞行控制设计带来极大挑战.必须研究高空低雷诺数环境下无人机总体气动综合优化设计方法,并突破现有的线性系统设计框架,在非线性系统分析、综合和主动振颤抑制方面取得突破.
4)超长航时无人机续航时间以“周”计算,大大超越了现有的各种航空器,对系统的任务可靠度提出了极高的要求.超长航时无人机上狭小的空间和苛刻的载重限制又严格限制了余度配置的规模.必须开展针对性研究,在规模受限条件下的超长航时飞行主动容错控制与自主决策技术方面取得突破,同时以无人系统的智能化、协同化和网络安全发展为方向,提升长航时无人机的应用范围和任务效能.
参考文献
[1]CESTINO E.Design of solar high altitude long endurance aircraft for multi payload & operations[J]. Aerospace Science and Technology, 2006, 10(6): 541. DOI: 10.1016/j.ast.2006.06.001
[2]TUZCU I, MARZOCCA P, CESTINO E, et al. Stability and control of a high-altitude, long-endurance UAV[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(3): 713. DOI: 10.2514/1.25814
[3]段海滨, 范彦铭, 张雷. 高空长航时无人机技术发展新思路[J]. 智能系统学报, 2012, 7(3): 195
DUAN Haibin,FAN Yanming, ZHANG Lei. New thoughts on the development of a HALE UAV[J]. CAAI Transactions on Intelligent Systems, 2012, 7(3): 195. DOI: 10.3969/j.issn.1673-4785.201111022
[4]马东立, 张良, 杨穆清, 等.超长航时太阳能无人机关键技术综述[J].航空学报, 2020, 41(3): 623418
MA Dongli, ZHANG Liang, YANG Muqing, et al. Review of key technologies of ultra-long-endurance solar powered unmanned aerial vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(3): 623418. DOI: 10.7527/S1000-6893.2019.23418
[5]WEIBEL R, HANSMAN R J. Safety considerations for operation of different classes of UAVs in the NAS[C]//Proceeding of the AIAA 3rd “Unmanned Unlimited” Technical Conference, Workshop and Exhibit. Chicago, Illinois: AIAA, 2004: 1. DOI: 10.2514/6.2004-6421
[6]NOLL T E, BROWN J M, PEREZ-DAVIS M E, et al. Investigation of the Helios prototype aircraft mishap[R].[S.l.]: NASA Report, 2004
[7]RAPINETT A. Zephyr: A high altitude long endurance unmanned air vehicle[D]. Guildford: University of Surrey, 2009
[8]MILLS G L, BUCHHOLTZ B, OLSEN A. Design, fabrication and testing of a liquid hydrogen fuel tank for a long duration aircraft[J]. AIP Conference Proceedings, 2012. 1434(1): 773. DOI: 10.1063/1.4706990
[9]DENNIS T Y, LIM. A methodological approach for conducting a business case analysis of the global observer joint capability technology demonstration (JCTD)[D]. Monterey: Naval Postgraduate School, 2007
[10]胡晓煜. 国外高空长航时无人机动力技术的发展[J]. 燃气涡轮试验与研究, 2006, 19(4): 56
HU Xiaoyu. Development of high altitude long endurance UAV propulsion technology[J]. Gas Turbine Experiment and Research, 2006, 19(4): 56. DOI: CNKI:SUN:RQWL.0.2006-04-012
[11]《世界无人系统大全》编写组. 世界无人系统大全[M]. 北京: 航空工业出版社, 2015
Comprehensive Unmanned Systems of the World’s Editors. Comprehensive unmanned systems of the world[M]. Beijing: Aviation Industry Press, 2015
[12]ERNST J, TSACH S, PENN D. Evolution of the Heron UAV family[C]//Proceedings of the Infotech@Aerospace Conferences. Arlington, Virginia: AIAA, 2005: 1. DOI: 10.2514/6.2005-7033
[13]祝彬, 陈笑南, 范桃英. 国外超高空长航时无人机发展分析[J]. 中国航天, 2013(11): 28
ZHU Bin, CHEN Xiaonan, FAN Taoying. Development analysis of ultra-high altitude long-endurance UAV abroad[J]. Aerospace China, 2013(11): 28
[14]LISSAMAN P B S. Low-Reynolds-Number airfoils[J]. Annual Review of Fluid Mechanics,1983, 15(1): 223. DOI: 10.1146/annurev.fl.15.010183.001255
[15]STEINBUCH M, SHEPSHELOVICH M. Development of high altitude long endurance airfoils[C]//Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit. Reno, Nevada: AIAA, 2004: 1. DOI: 10.2514/6.2004-1052
[16]BREHM C, MACK S, GROSS A, et al. Investigations of an airfoil at lowReynolds number conditions[C]//Proceedings of the 4th Flow Control Conference. Seattle, Washington: AIAA, 2013: 1. DOI: 10.2514/6.2008-3765
[17]朱志斌, 尚庆, 白鹏, 等. 翼型低雷诺数层流分离现象随雷诺数的演化特征[J]. 航空学报, 2019, 40(5): 122528
ZHU Zhibin, SHANG Qing, BAI Peng, et al. Evolution of laminar separation phenomenon on low Reynolds number airfoil at different Reynolds numbers[J]. Acta Aeronautica et Astronautica Sinica,2019, 40(5): 122528. DOI: 10.7527/S1000-6893.2018.22528
[18]PHILLIP M, KUNIHIKO T, TETSUYA S, et al. Nonlinear lift on a triangular airfoil in low-Reynolds number compressible flow[J]. Journal of Aircraft, 2015, 52(3): 924. DOI: 10.2514/1.C032983
[19]YANG Zifeng, IGARASHI H, MARTIN M, et al. An experimental investigation on aerodynamic hysteresis of alow-Reynolds number airfoil[C]//Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit. Reno, Nevada: AIAA, 2008: 1. DOI: 10.2514/6.2008-315
[20]ZHU Jun, GAO Zhenghong, ZHAN Hao, et al. A high-speed nature laminar flow airfoil and its experimental study in wind tunnel with nonintrusive measurement technique[J]. Chinese Journal of Aeronautics, 2009, 22(3): 225. DOI: 10.1016/S1000-9361(08)60091-6
[21]孔繁美, 华俊, 向锦武, 等. 高升力与失速特性缓和的翼型设计研究[J]. 北京航空航天大学学报, 2002, 28(2): 235
KONG Fanmei, HUA Jun, XIANG Jinwu, et al. Design and research of high-lift mild-stall airfoils[J]. Journal of Beijing University of Aeronautics and Astronautics, 2002, 28(2): 235. DOI: 10.13700/j.bh.1001-5965.2002.02.029
[22]SHI Yayun, BAI Junqiang, HUA Jun, et al. Numerical analysis and optimization of boundary layer suction on airfoils[J]. Chinese Journal of Aeronautics, 2015, 28(2): 357. DOI: 10.1016/j.cja.2015.02.011
[23]白俊强, 邱亚松, 华俊. 改进型Gappy POD翼型反设计方法[J]. 航空学报, 2013, 34(4): 762
BAI Junqiang, QIU Yasong, HUA Jun. Improved airfoil inverse design method based on Gappy POD[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(4): 762. DOI: 10.7527/S1000-6893.2013.0135
[24]DELLA V P, DANIELE E, D’AMATO E. An airfoil shape optimization technique coupling PARSEC parameterization and evolutionary algorithm[J]. Aerospace Science and Technology, 2014, 32(1): 103. DOI: 10.1016/j.ast.2013.11.006
[25]张扬, 白俊强, 朱军, 等. 改进Hicks-Henne型函数法在翼型参数化中的应用[J]. 飞行力学, 2011, 29(5): 35
ZHANG Yang, BAI Junqiang, ZHU Jun, et al. Application of improved Hicks-Henne shape function to airfoil parameterization[J]. Flight Dynamics, 2011, 29(5): 35.DOI: 10.13645/j.cnki.f.d.2011.05.012
[26]SKINNER S N, ZARE-BEHTASH H. State-of-the-art in aerodynamic shape optimisation methods[J]. Applied Soft Computing, 2018, 62: 933. DOI: 10.1016/j.asoc.2017.09.030
[27]FORRESTER A I J, KEANE A J. Recent advances in surrogate-based optimization[J]. Progress in Aerospace Sciences, 2009, 45(1/2/3): 50. DOI: 10.1016/j.paerosci.2008.11.001
[28]SIMPSON T W, POPLINSKI J D, KOCH P N, et al. Metamodels for computer-based engineering design: Survey and recommendations[J]. Engineering with Computers, 2001,17(2): 129. DOI: 10.1007/pl00007198
[29]BHOSEKAR A, IERAPETRITOU M. Advances in surrogate-based modeling, feasibility analysis, and optimization: A review[J]. Computers & Chemical Engineering, 2018, 108: 250. DOI: 10.1016/j.compchemeng.2017.09.017
[30]IMMONEN E. 2D shape optimization under proximity constraints by CFD and response surface methodology[J]. Applied Mathematical Modelling, 2017, 41: 508. DOI: 10.1016/j.apm.2016.09.009
[31]EBRAHIMI M, JAHANGIRIAN A. Aerodynamic optimization of airfoils using adaptive parameterization and genetic algorithm[J]. Journal of Optimization Theory & Applications, 2014, 162: 257. DOI: 10.1007/s10957-013-0442-1
[32]MASDARI M, TAHANI M, NADERI M H, et al. Optimization of airfoil based Savonius wind turbine using coupled discrete vortex method and salp swarm algorithm[J]. Journal of Cleaner Production, 2019, 222: 47. DOI: 10.1016/j.jclepro.2019.02.237
[33]ZHAO Huan, GAO Zhenghong.Uncertainty-based design optimization of NLF airfoil for high altitude long endurance unmanned air vehicles[J]. Engineering Computations, 2019, 36(3): 971. DOI: 10.1108/EC-05-2018-0215
[34]NIKOLAEV N V. Optimization of airfoils along high-aspect-ratio wing of long-endurance aircraft in trimmed flight[J].Journal of Aerospace Engineering, 2019, 32(6): 1. DOI: 10.1061/(ASCE)AS.1943-5525.0001086
[35]YANG Shanling, SPEDDING G R. Separation control by external acoustic excitation at low Reynolds numbers[J]. AIAA Journal, 2013, 51(6):1506. DOI: 10.2514/1.J052191
[36]BUCHMANN N A, ATKINSON C, SORIA J. Influence of ZNMF jet flow control on the spatio-temporal flow structure over a NACA-0015 airfoil[J]. Experiments in Fluids, 2013, 54(3):1485. DOI: 10.1007/s00348-013-1485-7
[37]左伟, 顾蕴松, 王奇特, 等. 低雷诺数下机翼气动特性研究及控制[J]. 航空学报, 2016, 37(4): 1139
ZUO Wei, GU Yunsong, WANG Qite, et al. Aerodynamic characteristics and flow control on a rectangular wing at low Reynolds number[J]. Acta Aeronautica et Astronautloa Sinica, 2016, 37(4): 1139. DOI: 10.7527 /S1000-6893.2015.0208
[38]刘沛清, 马利川, 屈秋林, 等. 低雷诺数下翼型层流分离泡及吹吸气控制数值研究[J]. 空气动力学学报, 2013, 31(4): 518
LIU Peiqing, MA Lichuan, QU Qiulin, et al. Numerical investigation of the laminar separation bubble control by blowing/suction on an airfoil at lowRe number[J]. Acta Aerodynamica Sinica, 2013, 31(4): 518
[39]FOUATIH O M, MEDALE M, IMINE O, et al. Design optimization of the aerodynamic passive flow control on NACA 4415 airfoil using vortex generators[J]. European Journal of Mechanics-B/Fluids, 2016, 56: 82. DOI: 10.1016/j.euromechflu.2015.11.006
[40]王鑫, 李山, 唐湛棋, 等. 沟槽对湍流边界层中展向涡影响的实验研究[J]. 实验流体力学, 2018, 32(1): 55
WANG Xin, LI Shan, TANG Zhanqi, et al. An experimental study on riblet-induced spanwise vortices in turbulent boundary layers[J]. Journal of Experiments in Fluid Mechanics, 2018, 32(1): 55. DOI: 10.11729/syltlx20170092
[41]CHANDRASEKHARA M S, MARTIN P B, TUNG C. Compressible dynamic stall control using a variable droop leading edge airfoil[J]. Journal of Aircraft, 2004, 41(4): 862. DOI: 10.2514/1.472
[42]JEFFREY D, ZHANG Xin, HURST D W. Aerodynamics of Gurney flaps on a single-element high-lift wing[J]. Journal of Aircraft, 2000, 37(2): 295. DOI: 10.2514/2.2593
[43]LI Daochun, ZHAO Shiwei, ANDREA D R, et al. A review of modelling and analysis of morphing wings[J]. Progress in Aerospace Sciences, 2018, 100: 46. DOI: 10.1016/j.paerosci.2018.06.002
[44]MONNER H P. Realization of an optimized wing camber by using form variable flap structures[J]. Aerospace Science and Technology, 2001, 5(7): 445. DOI: 10.1016/s1270-9638(01)01118-x
[45]LAFOUNTAIN C, COHEN K, ABDALLAH S. Camber controlled airfoil design for morphing UAV[C]//Proceedings of the 47th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. Orlando, Florida: AIAA, 2009: 092407. DOI: 10.2514/6.2009-1435
[46]DELLA V P, CORCIONE S, PECORA R, et al. Design and integration sensitivity of a morphing trailing edge on a reference airfoil: The effect on high-altitude long-endurance aircraft performance[J]. Journal of Intelligent Material Systems and Structures, 2017, 28(20): 2933. DOI: 10.1177/1045389X17704521
[47]NANGIA R K, PALMER M E, TILMANN C. Planform variation effects, unconventional high aspect-ratiojoined-wing aircraft incorporating laminar-flow[C]//Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit. Reno, Nevada: AIAA, 2005: 1. DOI: 10.2514/6.2005-243
[48]李军, 李占科, 宋笔锋. 联翼高空长航时无人机总体布局设计研究[J]. 飞行力学, 2009, 27(4): 1
LI Jun, LI Zhanke, SONG Bifeng. Conceptual layout design of the joined-wing High-Altitude-Long-Endurance UAV[J]. Flight Dynamics, 2009, 27(4): 1. DOI: 10.13645/j.cnki.f.d.2009.04.001
[49]董彦非, 陈元恺, 彭金京. 可变后掠翼技术发展与展望[J]. 飞行力学, 2014, 32(2): 97
DONG Yanfei, CHEN Yuankai, PENG Jinjing. Development and prospect of variable swept wing[J]. Flight Dynamics, 2014, 32(2): 97. DOI: 10.13645/j.cnki.f.d.2014.02.020
[50]OKONKWO P, SMITH H. Review of evolving trends in blended wing body aircraft design[J]. Progress in Aerospace Sciences, 2016, 82: 1. DOI: 10.1016/j.paerosci.2015.12.002
[51]PANAGIOTOU P, YAKINTHOS K. Parametric aerodynamic study of Blended-Wing-Body platforms at low subsonic speeds for UAV applications[C]//Proceedings of the 35th AIAA Applied Aerodynamics Conference. Denver, Colorado: AIAA, 2017: 1. DOI: 10.2514/6.2017-3737
[52]MAZAHERI K, KHAYATZADEH P, TAGHAVI N S. Laminar airfoil shape optimization using an Improved Genetic Algorithm (IGA)[C]//Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit. Reno, Nevada: AIAA, 2008: 1. DOI: 10.2514/6.2008-913
[53]JAMESON A, REUTHER J. Control theory based airfoil design using the Euler equations[C]//Proceedings of the 5th Symposium on Multidisciplinary Analysis and Optimization. Panama City Beach, FL: AIAA, 1994: 1. DOI:10.2514/6.1994-4272
[54]RAYMER D, CROSSLEY W. A comparative study of genetic algorithm and orthogonal steepest descent for aircraft multidisciplinary optimization[C]// Proceedings of the 40th AIAA Aerospace Sciences Meeting & Exhibit. Reno, Nevada: AIAA, 2002: 1. DOI: 10.2514/6.2002-514
[55]ALSAHLANI A A, JOHNSTON L J, ATCLIFFE P A. Design of a high altitude long endurance flying-wing solar-powered unmanned air vehicle[J]. Progress in Flight Physics, EDP Sciences, 2017, 9: 3. DOI: 10.1051 /eucass/201609003
[56]梁煜, 程小全, 郦正能, 等. 基于代理模型的气动外形平面参数多目标匹配设计[J]. 航空学报, 2010, 31(6): 1141
LIANG Yu, CHENG Xiaoquan, LI Zhengneng, et al. Multi-object aerodynamic configuration parameter design using Kriging approximation[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(6): 1141. DOI: 1000-6893(2010)06-1141-08
[57]PANAGIOTOU P, FOTIADIS K S, YAKINTHOS K. Conceptual design of a Blended Wing Body MALE UAV[J]. Aerospace Science & Technology, 2018, 73: 32. DOI: 10.1016/j.ast.2017.11.032
[58]马蓉, 刘沛清, 胡颖. 临近空间飞行器螺旋桨低雷诺数高升力翼型综述[C]//中国力学学会学术大会2007. 北京: 中国力学学会, 2007: 487
MA Rong, LIU Peiqing, HU Ying. Review of propeller low Reynolds number high lift airfoils for near space[C]//Proceedings of Academic Conference of Chinese Society of Mechanics 2007. Beijing: The Chinese Society of Theoretical and Applied Mechanics, 2007: 487
[59]BRANDT J, SELIG M. Propeller performance data at low Reynolds numbers[C]//Proceedings of the 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Orlando, Florida: AIAA, 2011: 1. DOI: 10.2514/6.2011-1255
[60]TRAUB L W, AGARWAL G. Aerodynamic characteristics of a Gurney/jet flap at low Reynolds numbers[J]. Journal of Aircraft, 2008, 45(2): 424. DOI: 10.2514/1.28016
[61]AREF P, GHOREYSHI M, JIRASEK A, et al. Computational study of propeller-wing aerodynamic interaction[J]. Aerospace, 2018, 5(3):79. DOI: 10.3390/aerospace5030079
[62]AMINAEI H, DEHGHAN M, MOSTOFIZADEH A R. Experimental investigation of propeller slipstream effects on the wing aerodynamics and boundary layer treatment at low Reynolds number[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233(8): 3033. DOI: 10.1177/0954410018793703
[63]WANG Kelei, ZHOU Zhou, ZHU Xiaoping, et al. Aerodynamic design of multi-propeller/wing integration at low Reynolds numbers[J]. Aerospace Science and Technology, 2019, 84: 1. DOI: 10.1016/j.ast.2018.07.023
[64]CATALANO F M.On the effects of an installed propeller slipstream on wing aerodynamic characteristics[J]. Acta Polytechnica, 2004, 44(3): 8
[65]RAKSHITH B R, DESHPANDE S M, NARASIMAHA R, et al. Optimal low-drag wing planforms for tractor-configuration propeller-driven aircraft[J]. Journal of Aircraft, 2015, 52(6): 1791. DOI: 10.2514/1.C032997
[66]ANANDA G K, SELIG M S, DETERS R W. Experiments of propeller-induced flow effects on a low-Reynolds-number wing[J]. AIAA Journal, 2018, 56(8): 3279. DOI: 10.2514/1.J056667
[67]陈广强, 白鹏, 詹慧玲, 等. 高空长航时无人机螺旋桨滑流效应影响研究[J]. 飞机设计, 2014, 34(4): 1
CHEN Guangqiang, BAI Peng, ZHAN Huiling, et al. Numerical simulation study on propeller slipstream effect on High Altitude Long Endurance Unmanned Air Vehicle (HALE UAV)[J]. Aircraft Design, 2014,34(4): 1. DOI: 10.19555/j.cnki.1673-4599.2014.04.001
[68]STUHLPFARRER M, VALERO-ANDREU A, BREITSAMTER C.Numerical and experimental investigations of the propeller characteristics of an electrically powered ultralight aircraft[J]. CEAS Aeronautical Journal, 2017, 8(3): 441. DOI: 10.1007/s13272-017-0245-4
[69]NICKOL C, GUYUN M, KOHOUT L, et al. High altitude long endurance air vehicle analysis of alternatives and technology requirements development[C]//Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit. Reno, Nevada: AIAA, 2007: 1. DOI: 10.2514/6.2007-1050
[70]FLITTIE K, CURTIN B. Pathfinder solar-powered aircraft flight performance[C]//Proceedings of the 23rd Atmospheric Flight Mechanics Conference. Boston, MA: AIAA, 1998: 618. DOI: 10.2514/6.1998-4446
[71]YOUNGBLOOD J W, TALAY T A. Solar-powered airplane design for long-endurance, high-altitude flight[C]//Proceedings of the 2nd International Very Large Vehicles Conference. Washington, DC: AIAA, 1982: 1. DOI: 10.2514/6.1982-811
[72]张健, 向锦武. 柔性飞机非线性气动弹性与飞行动力学耦合静、动态特性[J]. 航空学报, 2011, 32(9): 1569
ZHANG Jian, XIANG Jinwu. Static and dynamic characteristics of coupled nonlinear aeroelasticity and flight dynamics of flexible aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(9): 1569. DOI: CNKI: 11-1929/V.20110509.1158.006.
[73]李道春, 向锦武. 间隙非线性气动弹性颤振控制[J]. 北京航空航天大学学报, 2007, 33(6): 640
LI Daochun, XIANG Jinwu. Flutter control of aeroelasticity with freeplay nonlinearity[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(6): 640
[74]LI Daochun, GUO Shijun, XIANG Jinwu. Aeroelastic dynamic response and control of an airfoil section with control surface nonlinearities[J]. Journal of Sound and Vibration, 2010, 329(22): 4756. DOI: 10.1016/j.jsv.2010.06.006.
[75]PETERS D A, KARUNAMOORTHY S, CAO Wenming.Finite-state induced flow models, Part I: Two-dimensional thin airfoil[J]. Journal of Aircraft, 1995, 32(2): 313. DOI: 10.2514/3.46718
[76]LIU Yi, XIE Changchuan, YANG Chao, et al. Gust response analysis and wind tunnel test for a high-aspect ratio wing[J]. Chinese Journal of Aeronautics, 2016, 29(1): 91. DOI: 10.1016/j.cja.2015.12.013
[77]MURUA J, PALACIOS R, GRAHAM J M R. Applications of the unsteady vortex-lattice method in aircraft aeroelasticity and flight dynamics[J]. Progress in Aerospace Sciences, 2012, 55: 46. DOI: 10.1016/j.paerosci.2012.06.001
[78]SMITH M J, PATIL M J, HODGES D H. CFD-based analysis of nonlinear aeroelastic behavior of high-aspect-ratio wing[C]//Proceedings of the 19th AIAA Applied Aerodynamics Conference, Fluid Dynamics and Co-located Conference. Anaheim, CA: AIAA, 2001: 1. DOI: 10.2514/6.2001-1582
[79]GARCIA J A. A numerical investigation of nonlinear aeroelastic effects on flexible high aspect ratio wings[D]. California, Palo Alto: Stanford University, 2002
[80]GARCIA J A. Numerical investigation of nonlinear aeroelastic effects on flexible high-aspect-ratio wings[J]. Journal of Aircraft. 2005, 42(4): 1025. DOI: 10.2514/1.6544
[81]王伟, 周洲, 祝小平, 等. 考虑几何非线性效应的大柔性太阳能无人机静气动弹性分析[J]. 西北工业大学学报, 2014, 32(4): 499
WANG Wei, ZHOU Zhou, ZHU Xiaoping, et al. Static aeroelastic characteristics analysis of a very flexible solar powered UAV with geometrical nonlinear effect considered[J]. Journal of Northwestern Polytechnical University, 2014, 32(4): 499. DOI: 10.3969/j.issn.1000-2758.2014.04.004
[82]范锐军, 冯朝辉, 周洲. 大展弦比无人机的静气弹问题计算及分析[J]. 力学季刊, 2009, 30(4): 548
FAN Ruijun, FENG Zhaohui, ZHOU Zhou. Static aeroelastic investigation of large aspect ratio UAV[J]. Chinese Quarterly of Mechanics, 2009, 30(4): 548. DOI: 10.15959/j.cnki.0254-0053.2009.04.013
[83]张强, 祝小平, 周洲, 等. 高空长航时飞翼布局无人机静气动弹性研究[J]. 飞行力学, 2016, 34(1): 40
ZHANG Qiang, ZHU Xiaoping, ZHOU Zhou, et al. Study on static aeroelasticity of high altitude long endurance flying wing UAV[J]. Flight Dynamics, 2016, 34(1): 40. DOI: 10.13645/j.cnki.f.d.20150918.001
[84]刘湘宁, 向锦武. 大展弦比复合材料机翼的非线性颤振分析[J]. 航空学报, 2006, 27(2): 213
LIU Xiangning, XIANG Jinwu. Study of nonlinear flutter of high-aspect-ratio composite wing[J]. Acta Aeronautica et Astronautica Sinica, 2006, 27(2): 213. DOI: 10.3321/j.issn:1000-6893.200602.009
[85]ATTARAN A, MAJID D L, BASRI S, et al. Structural optimization of an aeroelastically tailored composite flat plate made of woven fiberglass/epoxy[J]. Aerospace Science and Technology, 2011, 15(5): 393. DOI: 10.1016/j.ast.2010.09.005
[86]KAMEYAMA M, FUKUNAGA H. Optimum design of composite plate wings for aeroelastic characteristics using lamination parameters[J]. Computers and Structures, 2007, 85(3/4): 213. DOI: 10.1016/j.compstruc.2006.08.051
[87]CESNIK C E S, BROWN E L. Modeling of high aspect ratio active flexible wings for roll control[C]//Proceedings of the 43rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Denver, Colored: AIAA, 2002: 1. DOI: 10.2514/6.2002-1719
[88]CESNIK C E S, BROWN E L. Active warping control of a joined wing-tail airplane configuration[C]//Proceedings of the 44th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Norfolk, Virginia: AIAA, 2003: 1. DOI: 10.2514/6.2003-1715
[89]BROWN E L. Integrated strain actuation in aircraft with highly flexible composite wings[D]. Cambridge: Massachusetts Institute of Technology, 2003
[90]SU Weihua, CESNIK C E S. Dynamic response of highly flexible flying wings[J]. AIAA Journal, 2011, 49(2): 324. DOI: 10.2514/1.J050496
[91]SU Weihua, CESNIK C E S. Nonlinear aeroelasticity of a very flexible blended-wing-body aircraft[J]. Journal of Aircraft, 2010, 47(5): 1539. DOI: 10.2514/1.47317
[92]TANG D, GRASCH A, DOWELL E H. Gust response forflexibly suspended high-aspect ratio wings[J]. AIAA Journal, 2010, 48(10): 2430. DOI: 10.2514/1.J050309
[93]PATIL M J, HODGES D H, CESNIK C E S. Nonlinear aeroelastic analysis of complete aircraft in subsonic flow[J]. Journal of Aircraft, 2000, 37(5): 753. DOI: 10.2514/2.2685
[94]PATIL M J. Limit cycle oscillations of aircraft due to flutter-induced drag[C]//Proceedings of the 43rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Denver, Colorado: AIAA, 2002: 1. DOI: 10. 2514/6.2002-1409
[95]PATIL M J, HODGES D H. Output feedback control of nonlinear aeroelastic response of a slender wing[J]. Journal of Guidance Control and Dynamics, 2002, 25(2): 302. DOI: 10.2514/2.4882
[96]KIM K, STRGANAC T W. Nonlinear responses of a cantilever wing with an external store[C]//Proceedings of the 44th AIAA/ASME/ASCE/AHS Structures, Structural Dynamics, and Materials Conference. Norfolk, Virginia: AIAA, 2003: 1. DOI: 10.2514/6.2003-1708
[97]ZHANG Jian, XIANG Jinwu. Nonlinear aeroelastic response of high-aspect-ratio flexible wings[J]. Acta Aeronautica et Astronautica Sinica, 2009(4): 355. DOI: 10.1016/s1000-9361(08)60111-9
[98]向锦武, 李道春, 赵仕伟. 一种考虑气动弹性约束的复合材料机翼多目标优化设计方法: 201310607041.2[P]. 2014-03-19
[99]向锦武, 李道春, 赵仕伟, 等. 一种基于气动力降阶模型的复合材料机翼优化设计方法: 201810145057.9[P]. 2018-02-12
[100]GUO Shijun, LI Daochun, LIU Y.Multi-objective optimization of a composite wing subject to strength and aeroelastic constraints[J]. Proceedings of the Institution of Mechanical Engineers, Part G Journal of Aerospace Engineering, 2012, 226(9): 1095. DOI: 10.1177 /09544100114177
[101]万志强, 杨超. 大展弦比复合材料机翼气动弹性优化[J]. 复合材料学报, 2005, 22(3): 145
WAN Zhiqiang, YANG Chao. Aeroelastic optimization of a high aspect ratio composite wing[J]. Acta Materiae Compositae Sinica, 2005, 22(3): 145. DOI: 10.3321/j.issn:1000-3851.2005.03.028
[102]白俊强, 辛亮, 刘艳, 等. 复合材料后掠机翼的气动弹性剪裁方法研究[J]. 西北工业大学学报, 2014, 32(6): 843
BAI Junqiang, XIN Liang, LIU Yan, et al. Exploring anaeroelastic tailoring design method for composite backswept wing[J]. Journal of Northwestern Polytechnical University, 2014, 32(6): 843. DOI:10.3969/j.issn.1000-2758.2014. 06.001
[103]刘湘宁, 向锦武. 大展弦比柔性复合材料机翼的气动弹性剪裁[J]. 北京航空航天大学学报, 2006, 32(12): 1403
LIU Xiangning, XIANG Jinwu. Study of aeroelastic tailoring of high-aspect-ratio flexible composite wing[J]. Journal of Beijing University of Aeronautics and Astronautics,2006, 32(12): 1403. DOI: 10.3969/j.issn.1001-5965.2006.12.003
[104]向锦武, 张雪娇, 赵仕伟, 等. 大展弦比复合材料机翼研究进展[J]. 哈尔滨工业大学学报, 2017, 49(10): 1
XIANG Jinwu, ZHANG Xuejiao, ZHAO Shiwei, et al. Recent advance in high-aspect-ratio composite wing[J]. Journal of Harbin Institute of Technology, 2017, 49(10): 1. DOI: 10.11918/j.issn.0367-6234.201705036
[105]张纪奎, 郦正能, 寇长河. 大展弦比复合材料机翼结构设计研究[J]. 航空学报, 2005, 26(4): 450
ZHANG Jikui, LI Zhengneng, KOU Changhe. Structural design of high aspect ratio composite material wing[J]. Acta Aeronautica et Astronautica Sinica, 2005, 26(4): 450. DOI: 10.3321/j.issn:1000-6893.2005.04.014
[106]刘峰, 马佳, 张春, 等. 某无人机复合材料主翼盒准等强度设计与有限元分析[J]. 玻璃钢/复合材料, 2015(4): 16
LIU Feng, MA Jia, ZHANG Chun, et al. Quasi-equal strength design and finite element analysis for composite main wing box of X UAV[J]. Fiber Reinforced Plastics/Composites, 2015(4): 16. DOI: 10.3969/j.issn.1003-0999.2015.04.003
[107]杨龙. 大展弦比太阳能无人机结构动力学研究[D]. 长沙: 国防科学技术大学, 2013
YANG Long. Research on structural dynamics of solar energy unmanned aerial vehicle[D]. Changsha: National University of Defense Science and Technology, 2013
[108]MEDDAIKAR Y M, DILLINGER J K S, SODJA J, et al. Optimization, manufacturing and testing of a composite wing with maximized tip deflection[C]//Proceedings of the 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. San Diego, California: AIAA Scitech Forum, 2016: 1. DOI: 10.2514/6.2016-0489
[109]VIO G A, COOPER J E. Optimization of the composite sensorcraft structure for gust alleviation[C]//Proceedings of the 12th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference. Victoria, British Columbia, Canada: AIAA, 2008: 1. DOI: 10.2514/6.2008-6017
[110]GAUTHIER-PERRON S, DRELA M. Passive gust load alleviation through bend-twist coupling of composite beams on typical commercial airplane wings[C]//Proceedings of the 54th AIAA/ASME/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Boston, Massachusetts: AIAA, 2013: 1. DOI: 10. 2514/6.2013-1490
[111]PARK W S, SHIN W J, KIM T. Development of the main wing structure of a high altitude long endurance UAV[J]. International Journal of Aeronautical & Space Sciences, 2018, 19(1): 53. DOI: 10.1007/s42405-018-0002-x
[112]《飞机设计手册》总编委会. 飞机设计手册第9册: 载荷、强度和刚度[M]. 北京: 航空工业出版社, 2001
Aircraft Design Manual’s Editors. Aircraft design manual 9: load, strength and stiffness[M]. Beijing: Aviation Industry Press, 2001
[113]汤平. 两种民用飞机翼身对接结构比较分析[J].航空制造技术, 2018, 61(13): 28
TANG Ping. Comparison and analysis on outer wing-fuselage connection of two civil aircrafts[J]. Aeronautical Manufacturing Technology. 2018, 61(13): 28.DOI: 10.16080/j.issn1671-833x.2018.13.028
[114]BENJAMIN J, SAM C, DANIEL C, et al. Digital morphing wing active wing shaping concept using composite lattice-based cellular structures[J]. Soft Robotics, 2017, 4(1): 33. DOI: 10.1089/soro.2016.0032
[115]胡江波, 梁宪珠, 张铖, 等. 高载荷质量比复合材料机翼模型结构设计与制造研究[J]. 材料开发与应用, 2011, 26(3): 41
HU Jiangbo, LIANG Xianzhu, ZHANG Cheng, et al. Study on structure design and manufacture of high load-weight ratio composite wing model[J]. Development and Application of Materials, 2011, 26(3): 41. DOI: 10.19515/j.cnki.1003-1545.2011.03.011
[116]向锦武, 李道春, 赵仕伟, 等. 一种复合材料机翼防固化变形模具设计: 201810151683.9[P]. 2018-08-31
[117]向锦武, 李道春, 张雪娇, 等. 一种复合材料机翼开口补强的优化设计方法: 201810146327.8[P]. 2018-09-04
[118]张健. 柔性飞机非线性气动弹性与飞行动力学耦合建模与仿真[D]. 北京:北京航空航天大学, 2010
ZHANG Jian. Modeling and simulation of coupled nonlinear aeroelasticity and flight dynamics for flexible aircraft[D].Beijing: Beihang University, 2010
[119]WASZAK M R, SCHMIDT D K. Flight dynamics of aeroelastic vehicles[J]. Journal of Aircraft, 1988, 25(6): 563. DOI: 10.2514/3.45623
[120]BUTTRILL C S, ARBUCKLE P D, ZEILER T A. Nonlinear simulation of a flexible aircraft in maneuvering flight[C]//Proceedings of the AIAA Flight Simulation Technologies Conference. Monterey, CA: AIAA, 1987: 122. DOI: 10.2514/6.1987-2501
[121]MEIROVITCH L, TUZCU I. Unified theory for the dynamics and control of maneuvering flexible aircraft[J]. AIAA Journal, 2004, 42(4): 714. DOI: 10.2514/1.1489
[122]DAMVELD H, MULDER J A. Influence of instationary aerodynamics and trimming on the dynamics of an aeroelastic aircraft[C]//Proceedings of the AIAA Modeling and Simulation Technologies Conference, San Francisco, CA: AIAA, 2005: 1. DOI: 10.2514/6.2005-6334
[123]SILVESTRE F J, PAGLIONE P. Dynamics and control of a flexible aircraft[C]//Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit. Honolulu, Hawaii: AIAA, 2008: 1. DOI: 10.2514/6.2008-6876
[124]PATIL M J, HODGES D H, CESNIK C E S. Nonlinear aeroelasticity and flight dynamics of high-altitude long-endurance aircraft[J]. Journal of Aircraft, 2001, 38(1): 88. DOI: 10.2514/2.2738
[125]肖伟, 周洲, 祝小平, 等. 高空太阳能无人机飞行动力学建模与分析[J]. 飞行力学, 2012, 30(5): 385
XIAO Wei, ZHOU Zhou, ZHU Xiaoping, et al. Modelling and analysis on flight dynamics of high altitude solar UAV[J]. Flight Dynamics, 2012, 30(5): 385.DOI:10.13645/j.cnki.f.d. 2012.05.004
[126]肖伟, 周洲, 祝小平, 等. 柔性太阳能无人机飞行动力学与控制仿真研究[J]. 系统仿真学报, 2014, 26(3): 704
XIAO Wei, ZHOU Zhou, ZHU Xiaoping, et al. Simulation of flight dynamics and control of hale solar UAV[J]. Journal of System Simulation, 2014, 26(3): 704. DOI:10.16182/j.cnki. joss.2014.03.010
[127]冯扬帆, 周洲, 肖伟. 高空太阳能弹性无人机纵向动力学特性研究[J]. 飞行力学, 2014, 32(1): 1
FENG Yangfan, ZHOU Zhou, XIAO Wei. Study on longitudinal flight dynamic characteristics of high altitude flexibility solar UAV[J]. Flight Dynamics, 2014, 32(1): 1.DOI:10.13645/j.cnki.f.d.2014.01.001
[128]王睿, 祝小平, 周洲. 多螺旋桨太阳能无人机横航向操稳特性研究[J]. 飞行力学, 2012, 30(1): 5
WANG Rui, ZHU Xiaoping, ZHOU Zhou. Research on lateral-directional flying qualities of multi-propeller solar powered UAV[J]. Flight Dynamics, 2012, 30(1): 5. DOI:10.13645/j.cnki.f.d.2012.01.006
[129]李锋, 叶川, 李广佳, 等. 临近空间太阳能飞行器横航向稳定性[J]. 航空学报, 2016, 37(4): 1148
LI Feng, YE Chuan, LI Guangjia, et al. Lateral-directional stability of near-space solar-powered aircraft[J]. Chinese Journal of Aerodynamics, 2016, 37(4): 1148. DOI: 10.7527/S1000-6893.2015.0225
[130]HAGHIGHAT S, LIU H T, MARTINS J R A. Model-predictive gust load alleviation controller for a highly flexible aircraft[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(6): 1751. DOI: 10.2514/1.57013
[131]CHANG C S, HODGES D H, PATIL M J. Flight dynamics of highly flexible aircraft[J]. Journal of Aircraft, 2008, 45(2): 538. DOI: 10.2514/1.30890
[132]郭东, 徐敏, 陈士橹. 弹性飞行器飞行动力学建模研究[J]. 空气动力学学报, 2013, 31(4): 413
GUO Dong, XU Min, CHEN Shilu. Research on flight dynamic modeling of highly flexible aircrafts[J]. Acta Aerodynamica Sinica, 2013, 31(4): 413
[133]DRELA M. Integrated simulation model for preliminary aerodynamic, structural, and control-law design of aircraft[C]//Proceedings of the 40th AIAA/ASME/ASCE/ AHS/ASC Structures, Structural Dynamics and Materials Conference. St. Louis, MO: AIAA, 1999: 1644. DOI: 10.2514/6.1999-1394
[134]PATIL M J, HODGES D H. Flight dynamics of highly flexible flying wings[J]. Journal of Aircraft, 2006, 43(6): 1790. DOI: 10.2514/1.17640
[135]WANG Zhicun, CHEN P C, LIU D, et al. Time domain nonlinear aeroelastic analysis for HALE wings[C]//Proceedings of the 47th AIAA/ASME/ASCE/AHS/ ASC Structures, Structural Dynamics, and Materials Conference. Newport, Rhode Island: AIAA, 2006: 1. DOI: 10.2514/6.2006-1640
[136]HESSE H, PALACIOS R. Reduced-order aeroelastic models for dynamics of maneuvering flexible aircraft[J]. AIAA Journal, 2014, 52(8): 1717. DOI: 10.2514/1.J052684
[137]LIVNE E. Aircraft active flutter suppression: State of the art and technology maturation needs[J]. Journal of Aircraft, 2018, 55(1): 410. DOI: 10.2514/1.C034442
[138]MUKHOPADHYAY V. Historical perspective on analysis and control of aeroelastic responses[J]. Journal of Guidance, Control, and Dynamics, 2003, 26(5): 673. DOI: 10.2514/2.5108
[139]LIVNE E. Future of airplane aeroelasticity[J]. Journal of Aircraft, 2003, 40(6): 1066. DOI: 10.2514/2.7218
[140]LEE K W, SINGH S N. Adaptive control of multi-input aeroelastic system with constrained inputs[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(12): 2337. DOI: 10.2514/1.G001022
[141]NGUYEN N T, SWEI S M, TING E. Adaptive linear quadratic gaussian optimal control modification for flutter suppression of adaptive wing[C]//Proceedings of the AIAA Infotech @ Aerospace. Kissimmee, Florida: AIAA, 2015: 1. DOI: 10.2514/6.2015-0118
[142]DANOWSKY B P, THOMPSON P M, LEE D C, et al. Modal isolation and damping for adaptive aeroservoelastic suppression[C]//Proceedings of the AIAA Atmospheric Flight Mechanics (AFM) Conference. Boston, MA: AIAA, 2013: 1. DOI: 10.2514/6.2013-4743
[143]CESNIK C E S, ORTEGA-MORALES M. Active aeroelastic tailoring of slender flexible wings[C]//Proceedings of the International Forum on Aeroelasticity and Structural Dynamics. Madrid, Spain: Council of European Aerospace Societies, 2001: 497
[144]AFONSO F, VALE J, OLIVEIRA E, et al. Active flutter suppression of a high aspect-ratio wing using aileron control[C]//Proceedings of the 6th EASN International Conference on Innovation in European Aeronautics Research, Porto, Portugal: [s.n.], 2016
[145]ZHAO Zhenjun, REN Gexue. Multibody dynamic approach of flight dynamics and nonlinear aeroelasticity of flexible aircraft[J]. AIAA Journal, 2011, 49(1): 41. DOI: 10.2514/1.45334
[146]DILLSAVER M J, CESNIK C E S, KOLMANOVSKY I V. Gust load alleviation control for very flexible aircraft[C]//Proceedings of the AIAA Atmospheric Flight Mechanics Conference. Portland, Oregon: AIAA, 2011: 1. DOI: 10.2514 /6.2011-6368
[147]WANG Rui, ZHU Xiaoping, ZHOU Zhou. Design gust alleviation controller for highly flexible solar UAV[C]//Proceedings of the 3rd International Conference on Measuring Technology and Mechatronics Automation. Shangshai: IEEE, 2011: 930. DOI: 10.1109/ICMTMA. 2011.233
[148]COOK R G, PALACIOS R, GOULART P. Robust gust alleviation and stabilization of very Flexible Aircraft[J]. AIAA Journal, 2013, 51(2): 330. DOI: 10.2514/1.J051697
[149]WANG Yinan, WYNN A, PALACIOS R. Nonlinear modal aeroservoelastic analysis framework for flexible aircraft[J]. AIAA Journal, 2016, 54(10): 3075. DOI: 10.2514/1.J054537
[150]ZENG Jie, MOULIN B, BRENNER M J. Adaptive feedforward control for gust load alleviation[J]. Journal of Guidance Control and Dynamics, 2010, 33(3): 862. DOI: 10.2514/1.46091
[151]陈磊, 吴志刚, 杨超, 等. 多控制面机翼阵风减缓主动控制与风洞试验验证[J]. 航空学报, 2009, 30(12): 2250
CHEN Lei, WU Zhigang, YANG Chao, et al. Active control and wind tunnel test verification of multi-control surfaces wing for gust alleviation[J]. Acta Aeronautica et Astronautica Sinica, 2009, 30(12): 2250
[152]GADIENT R, LAVRETSKY E, WISE K. Very flexible aircraft control challenge problem[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference. Minneapolis, Minnesota: AIAA, 2012: 1. DOI: 10.2514/6.2012-4973
[153]HAGHIGHAT S, LIU H, MARTINS J. Mixed-norm multi-objective robust controller applied to a very flexible aircraft[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference. Portland, Oregon: AIAA, 2011: 1. DOI: 10.2514/6.2011-6256
[154]CHE Jiaxing, GREGORY I M, CAO Chengyu. Integrated flight/structural mode control for very flexible aircraft using l1 adaptive output feedback controller[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference. Minneapolis, Minnesota: AIAA, 2012: 1. DOI: 10.2514/6.2012-4439
[155]SHEARER C M, CESNIK C E S. Nonlinear flight dynamics of very flexible aircraft[J]. Journal of Aircraft, 2007, 44(5): 1528. DOI: 10.2514/1.27606
[156]ZHENG Qu, ANNASWAMY A M, LAVRETSKY E. Adaptive output-feedback control for a class of multi-input-multi-output plants with applications to very flexible aircraft[C]//Proceedings of the American Control Conference. Boston, MA: IEEE, 2016: 1613. DOI: 10.1109/ACC.2016.7525147
[157]SADAT-HOSEINI H, FAZELZADEH S A, RASTI A, et al. Final approach and flare control of a flexible aircraft in crosswind landings[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(4): 946. DOI: 10.2514/1.59725
[158]RAGHAVAN B, PATIL M J. Flight control for flexible high aspect ratio flying wings[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(1): 64. DOI: 10.2514/1.45471
[159]QI Pengyuan, ZHAO Xiaowei, WANG Yinan, et al. Aeroelastic and trajectory control of high altitude long endurance aircraft[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(6): 2992. DOI: 10.1109/TAES.2018.2836598
[160]DILLSAVER M J, CESNIK C E S, KOLMANOVSKY I V. Trajectory control of very flexible aircraft with gust disturbance[C]//Proceedings of the AIAA Atmospheric Flight Mechanics (AFM) Conference. Boston, MA: AIAA, 2013: 1. DOI: 10.2514/6.2013-4745
[161]吴海仙, 俞文伯, 房建成. 高空长航时无人机SINS/CNS组合导航系统仿真研究[J]. 航空学报, 2006, 27(2): 299
WU Haixian, YU Wenbo, FANG Jiancheng. Simulation of SINS/CNS integrated navigation system used on high altitude and long-flight-time unpiloted aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2006, 27(2): 299. DOI: 10.3321/j.issn: 1000-6893.2006.02.027
[162]WU Xiaojuan, WANG Xinlong. A SINS/CNS deep integrated navigation method based on mathematical horizon reference[J]. Aircraft Engineering and Aerospace Technology, 2011, 83(1): 26. DOI: 10.1108/00022661111119892
[163]QUAN Wei, FANG Jiancheng, XU Fan, et al. Hybrid simulation system study of SINS/CNS integrated navigation[J]. IEEE Aerospace and Electronic Systems Magazine, 2008, 23(2):17. DOI: 10.1109/maes.2008.4460727
[164]YANG Bo, WANG Yuegang, CHAI Yan. High accuracy and reliability integrated navigation method for long-endurance aircraft[C]// Proceedings of the 9th International Conference on Hybrid Intelligent Systems (HIS 2009). Shenyang, China: IEEE Computer Society, 2009: 1. DOI:10.1109/HIS.2009.91
[165]周姜滨, 袁建平, 罗建军, 等. 高空长航时无人机导航系统研究[J]. 西北工业大学学报, 2008, 26(4): 463
ZHOU Jiangbin, YUAN Jianping, LUO Jianjun, et al. Navigation system of HALE UAV (high altitude long endurance unmanned aerial vehicle)[J]. Journal of Northwestern Polytechnical University, 2008, 26(4):463. DOI:10.3969/j.issn.1000-2758.2008.04.014
[166]ZHANG Zengan, CHEN Xin, ZHOU Yueping. Implementation of a distributed fault-tolerant computer for UAV[C]//Proceedings of the 2010 International Conference on Electrical and Control Engineering. Wuhan, China: IEEE, 2010: 1. DOI: 10.1109/iCECE.2010.1278
[167]HEYDARZADEH M, NOURANI M. A two-stage fault detection and isolation platform for industrial systems using residual evaluation[J]. IEEE Transactions on Instrumentation and Measurement, 2016, 65(10): 2424. DOI: 10.1109/TIM.2016.2575179
[168]WANG Zheng, ANAND D M, MOYNE J, et al. Improved sensor fault detection, isolation, and mitigation using multiple observers approach[J]. Systems Science & Control Engineering, 2017, 5(1): 70, DOI: 10.1080/21642583.2016 1278410
[169]ZANOLI S M, ASTOLFI G. Application of a fault detection and isolation system on a rotary machine[J]. International Journal of Rotating Machinery, 2013: 1. DOI: 10.1155/2013/189359
[170]曾国奇, 向锦武, 赵民强. 一种基于卫星通信的无人机导航数据被欺骗识别方法: 201510666815.8[P]. 2016-01-13
A review of key technologies for long-endurance unmanned aerial vehicle
XIANG Jinwu1,2, KAN Zi2, SHAO Haoyuan2, LI Huadong2, DONG Xin2, LI Daochun2
(1.Institute of Unmanned System, Beihang University, Beijing 100083, China;2.School of Aeronautic Science and Engineering, Beihang University, Beijing 100083, China)
Abstract: To investigate the development trends and challenges of long-endurance unmanned aerial vehicle (UAV), the research status of key technologies were analyzed and summarized. Long-endurance UAV has extensive application prospects because of its characteristics of high flight height, long operation time, and wide operation coverage. First, the representative long-endurance UAVs in the world were classified based on conventional power and new energy power, and the development history of long-endurance UAV was reviewed. Based on the demand of high lift, high lift-drag ratio, and moderate stall aerodynamic characteristics of long-endurance UAV, the large flexibility of high-aspect-ratio composite wing, and the complex mission environment of long-endurance UAV, the key technologies were analyzed, including high efficiency aerodynamic integrated design technology, aeroelastic analysis of high-aspect-ratio wing and active control technology, aeroelastic tailoring technology, flexible flight dynamics modeling and control technology, and autonomous navigation technology, etc. Finally, combined with the development situations of foreign long-endurance UAV, suggestions for the development of long-endurance UAV in China were put forward. Research shows that the conventional power long-endurance UAV has been widely used, while the new energy power long-endurance UAV is still in the prototype development stage. Technologies applied on the ultra-long-endurance UAV which has a duration of more than a week have become the focus of attention. The intelligence, collaboration, and network security of long-endurance UAV systems will be the main development directions in the future.
Keywords: long-endurance UAV; aerodynamics optimization design; high-aspect-ratio composite wing; aeroelasticity nonlinearity; active control technology; flight trajectory control; autonomous navigation
DOI:10.11918/202004009
中图分类号: V279+.3
文献标志码:A
文章编号: 0367-6234(2020)06-0057-21
收稿日期: 2020-04-01
基金项目: 国家自然科学基金(11972059)
作者简介: 向锦武(1964—),男,教授,博士生导师,中国工程院院士
通信作者: 李道春,lidc@buaa.edu.cn
| 敬请关注“尖兵之翼”(始于2006年)中国无人机大会暨展览会 |

北京高博特广告有限公司 版权所有,并保留所有权利 © 2018 -2021
