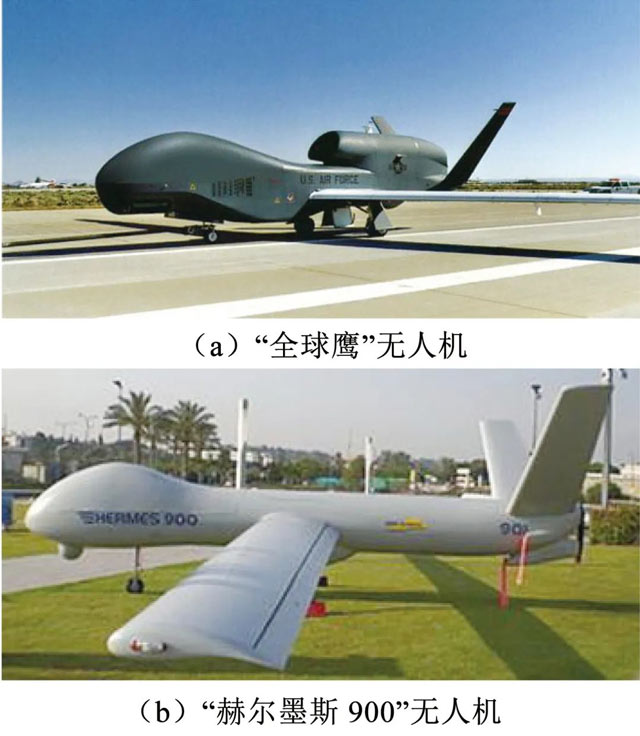
图2 国外典型的常规动力长航时无人机
Fig.2 Representative foreign conventional powered long-endurance UAVs
近20年,中国针对长航时无人机开展了相关技术研究和型号研制工作,并取得了较大进展.北京航空航天大学牵头研发的“长鹰”系列中高空远程无人侦察机,续航时间超过40 h,主要用于执行侦察任务和情报收集,该机于2015年纪念中国人民抗日战争暨世界反法西斯战争胜利70周年阅兵式上公开亮相.
1.2 新能源动力长航时无人机
液氢燃料的能重比约为普通燃料的3倍,属于高密度动力能源.近年来针对液氢燃料的长航时无人机的研究逐渐增多,但均处于试验阶段.“全球观察者”(Global Observer)是美国航空环境公司研制的高空长航时无人机系统,是世界上第1种采用液氢燃料为动力的无人机.“全球观察者-1”为全尺寸原型机,目标是在19 800 m的高空持续飞行120 h以上.2011年该机在爱德华兹空军基地进行的试验中,首次全程使用液氢燃料发动机,飞行高度1 500 m,持续飞行4 h.“鬼怪眼”(Phantom Eye)无人机由波音公司研制,采用2台2.3 L、4缸液氢推进系统.2010年“鬼怪眼”无人机首次完成了自主飞行,2013年实现了在8 400 m高空4.5 h的持续飞行,但是距离其96 h的设计飞行时间仍有很大差距[13].
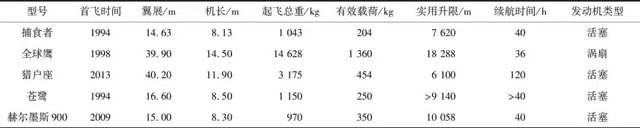
表1 国外主要常规动力长航时无人机关键参数[11]
Tab.1 Key parameters of foreign conventional powered long-endurance UAVs[11]
新能源长航时无人机除采用氢能源外,还可以采用太阳能作为动力.太阳能无人机在光照条件下能够通过太阳能电池维持动力系统并储存电能,飞行高度高,续航时间长,是目前各国研究的热点.尽管相比常规动力无人机,太阳能无人机在飞行性能和有效载荷能力等方面有明显不足,但是在长航时续航方面优势明显,理论上可以实现无限时间巡航[4].目前,较著名的长航时太阳能无人机有美国航空环境公司与NASA联合研制的“太阳神”系列无人机,该系列无人机包含“探路者”(Pathfinder)、“探路者+”(Pathfinder-Plus)、“百夫长”(Centurion)和“太阳神”(Helios)等型号;英国国防部下属公司研制的“西风”系列无人机,该系列包括“西风6”(Zephyr 6)、“西风7”(Zephyr 7)和“西风8”(Zephyr 8)等型号.另外,瑞士苏黎世联邦理工学院研发的AtlantikSolar太阳能无人机于2015年创造了81 h的连续飞行记录,UAVOS设计的ApusDuo自主式太阳能无人机旨在实现365 d巡航的目标.国外具有代表性的新能源无人机及主要参数,如图3和表2所示.
近几年,中国相关院所和高校对太阳能无人机开展了设计研究,并进行了飞行试验.2019年7月,西北工业大学“魅影”团队研发的MY-12太阳能无人机,成功实现跨昼夜飞行,达到27 h 37 min,是中国目前已公开报道的续航时间最长的太阳能无人机.
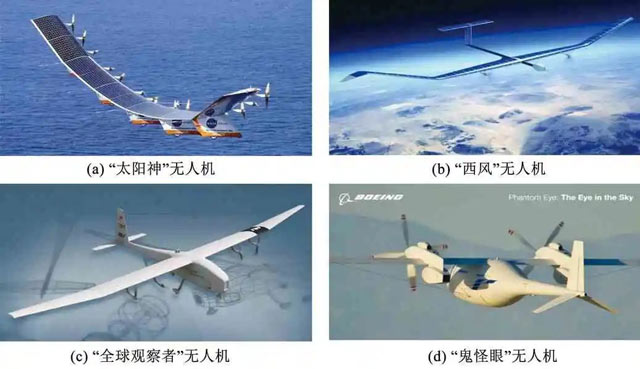
图3 国外主要的新能源长航时无人机
Fig.3 Representative foreign new energy powered long-endurance UAVs
表2 国外主要新能源动力长航时无人机参数[11]
Tab.2 Key parameters of foreign new energy powered long-endurance UAVs[11]
2 长航时无人机总体气动综合设计技术
长航时无人机的气动性能需要满足巡航时间和巡航高度的要求,总体气动综合设计是飞行器达到战术技术指标或使用技术要求的核心关键技术,决定了飞行器的整体气动性能和飞行性能.长航时无人机飞行高度较高,飞行环境中空气稀薄,飞行雷诺数较低,巡航时所需升力系数较大,且由于长航时飞行,要求机内储油空间大,巡航阻力小.因此,长航时无人机气动综合设计需要进行高升力、高升阻比、低雷诺数翼型优化设计研究和无人机高效气动布局研究.
2.1 高升阻比机翼优化设计
低雷诺数条件下,翼型在小攻角时就可能发生流动分离,翼型的升力线斜率也会降低,难以获得高升阻比[14],现有长航时无人机的升阻比通常在20以下,长航时无人机的代表“全球鹰”升阻比达到28左右.长航时无人机机翼通常采用小后掠角、大展弦比形式,机翼具有较弱的三维效应,因此二维翼型的气动特性对提高飞机的性能和飞行品质有直接影响,需要同时具备高升阻比、高升力和缓失速特性[15].常用翼型的类型主要包括:层流翼型、高升力翼型和超临界翼型等.具体翼型可以在现有的翼型库中选取,如NACA6A族、GAW系列、SD系列、Eppler系列[16]等,也可以以满足飞机设计任务指标为准则,基于翼型的流动特征和升力特性,通过优化设计得到.






